1/
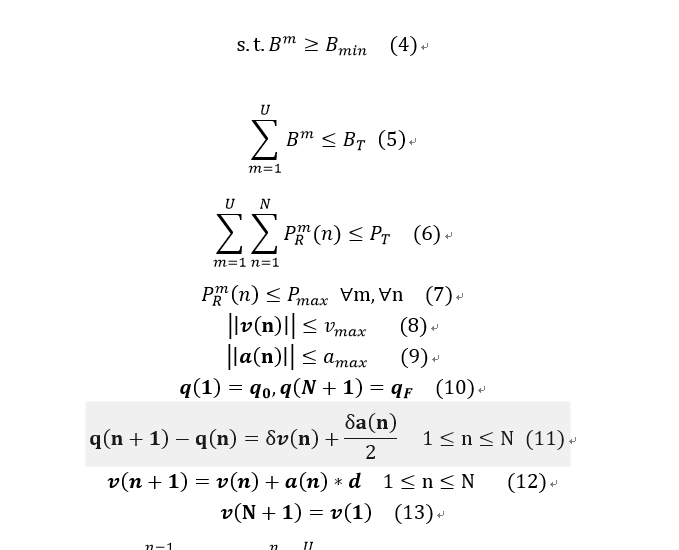
the problem is that i want to find some feasible points with cvx and the mathematical form of feasible problem is following :


where the a and v is 3-dimension vector in each time slot and q is a 3-dimension vector whose third dimension is constant in each time slot.
2/
the input data is following:
U=2;
J=2;
K=1;
h=100;
N_0dbm=-170;
B_T=2*1e7;
Bmax=5*1e6;
N_0=power(10,N_0dbm/10)/1000;
B_0=2*1e7;
beta_dbm=-50;
beta=power(10,beta_dbm/10)/1000;
c=9.26*1e-4;
b=2250;
g=9.8;
vmax=40;
vmin=3;
amax=5;
d=1;
T=200;
N=T/d;
P_J=0.1;
P_B=0.1;
alpha=3;
K_0=10^-3;
ex=exprnd(1,N+1,1);
Pmax_dbm=16;
Pmax=power(10,Pmax_dbm/10)/1000;
Pave_dbm=10;
Pave=power(10,Pave_dbm/10)/1000;
P_T=N*Pave;
Q_0=[-550,100,100]';
Q_F=[550,100,100]';
Q_B=[-500,0,0]';
for k=1:K
Q_J(:,k)=[-500+40*randn(1),50*randn(1),0]';
end
for k=K+1:J
Q_J(:,k)=[300+30*randn(1),50+10*randn(1),0]';
end
for m=1:U
Q_U(:,m)=[500+20*randn(1),100+20*randn(1),0]';
end
for m=1:U
for n=1:N+1
for k=K+1:J
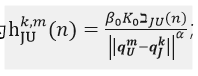
h_JU(m,n,k)=K_0*beta*ex(n)*power(norm(Q_U(:,m)-Q_J(:,k)),-alpha);
end
end
end
3/
The CVX output is following :
Calling SDPT3 4.0: 5022 variables, 1608 equality constraints
For improved efficiency, SDPT3 is solving the dual problem.
num. of constraints = 1608
dim. of socp var = 2608, num. of socp blk = 602
dim. of linear var = 2213
dim. of free var = 201
798 linear variables from unrestricted variable.
*** convert ublk to lblk
number of dense column in A = 1
SDPT3: Infeasible path-following algorithms
version predcorr gam expon scale_data
NT 1 0.000 1 0
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
0|0.000|0.000|1.6e+03|4.3e+01|1.6e+12| 8.938271e+08 0.000000e+00| 0:0:00| spchol
SMW too ill-conditioned, switch to LU factor, Inf.
warning: symqmr failed: 0.3
switch to LU factor. splu 202 1
linsysolve: solution contains NaN or inf.
stop: difficulty in computing corrector directions
number of iterations = 1
primal objective value = 8.93827076e+08
dual objective value = 0.00000000e+00
gap := trace(XZ) = 1.62e+12
relative gap = 1.82e+03
actual relative gap = 1.00e+00
rel. primal infeas (scaled problem) = 1.61e+03
rel. dual " " " = 4.26e+01
rel. primal infeas (unscaled problem) = 0.00e+00
rel. dual " " " = 0.00e+00
norm(X), norm(y), norm(Z) = 2.0e+03, 0.0e+00, 8.1e+08
norm(A), norm(b), norm© = 8.2e+01, 1.0e+00, 1.9e+07
Total CPU time (secs) = 0.82
CPU time per iteration = 0.82
termination code = 0
DIMACS: 1.6e+03 0.0e+00 4.3e+01 0.0e+00 1.0e+00 1.8e+03
Status: Solved
Optimal value (cvx_optval): -8.93827e+08
4/
this is the optimal result of B.
this is the optimal result of P
Actually,they neither satisfy the constraint.