I have no idea why the error happened? Here’s the error.
Here’s my input data.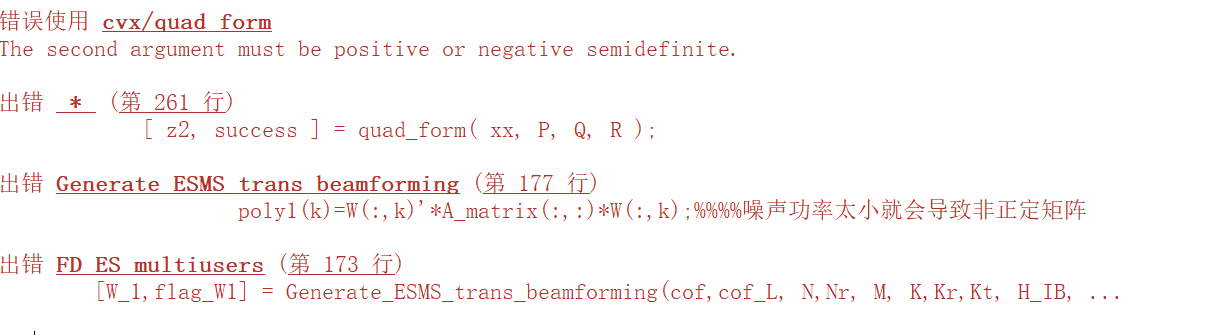
%% Parameters Initialization %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% ‘1’ stands for source-relays; ‘2’ stands for relays-destination
N = 6; % array number of BS 缁村害蹇呴』涓?5锛屽洜涓?5鏉℃洸绾?
Nr = 5;
M = 10; % array number of STAR-RIS 10-50
M1=M/2;
Kr = 4; % number of users
Kt = 3;
K = Kt+Kr;
SNR_dB = 10; % dBW
cof_L = 0.5.ones(K,1); %coefficient of loop interference
cof_S = 0.5.ones(K-1,1); %coefficient of self interference
cof =[cof_S;1];%select coeffient 21dimension
%%%%% noise
N0=10^((-174-30) / 10); %-174dBm
B=10^7; %10MHz
down_maxpower_all=20;
up_maxpower_all = 20;
% noise_maxpower_original = N0B; % % W
noise_maxpower_original = 10^((-80-30) / 10);%-80dBm
power_max_dBm=10;
%% Simulation loop %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
num_loop =100;
num_iterative = 10;
load(‘H_UI_ALL’);
load(‘H_IU_ALL’);%鍒濆鍖栦俊閬?
load(‘H_IE_ALL’);
load(‘H_IB_ALL’);
load(‘H_BI_ALL’);
load(‘H_BB_ALL’);
load(‘H_UU_ALL’);
load(‘H_UIr_ALL.mat’);
load(‘H_UIt_ALL.mat’);
load(‘H_IUr_ALL.mat’);
load(‘H_IUt_ALL.mat’);
load(‘H_UUr_ALL.mat’);
load(‘H_UUt_ALL.mat’);
%Rate=zeros(K,length(rate_min_dB),100);%鍒濆鍖栭?熺巼鐭╅樀鐢ㄤ簬淇濆瓨鍙傛暟銆?
SumRate1=zeros(num_loop,num_iterative,length(down_maxpower_all));
for loop = 1 : num_loop %浠?1寮?濮嬪惊鐜?
outerflag=1;
T1=cputime;
noise_maxpower=1;%鍣0鍔熺巼褰掍竴鍖?
%%% For different 鑷彉閲? %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
fprintf(’ loop | N | iteration \n’);
for i_p = 1 : length(down_maxpower_all)%涓嶅悓N,M鎴栦笉鍚屽彂灏勫姛鐜?
t0=cputime;
down_maxpower=down_maxpower_all;
up_maxpower=up_maxpower_all;
%%%%% Initialize Fi for different mode(ES,MS and TS ) %%%%%%%%%%%%%%%
H_IB=H_IB_ALL(1:Nr,1:M,loop)/sqrt(noise_maxpower_original);%淇¢亾褰掍竴鍖?
H_BI=H_BI_ALL(1:M,1:N,loop)/sqrt(noise_maxpower_original);
H_IU=H_IU_ALL(1:M,1:K,loop)/sqrt(noise_maxpower_original);
H_IUr=H_IUr_ALL(1:M,1:Kr,loop)/sqrt(noise_maxpower_original);
H_IUt=H_IU_ALL(1:M,1:Kt,loop)/sqrt(noise_maxpower_original);
H_UI=H_UI_ALL(1:K,1:M,loop)/sqrt(noise_maxpower_original);
H_UIr=H_UIr_ALL(1:Kr,1:M,loop)/sqrt(noise_maxpower_original);
H_UIt=H_UIt_ALL(1:Kt,1:M,loop)/sqrt(noise_maxpower_original);
H_IE=H_IE_ALL(1:M,1:2,loop)/sqrt(noise_maxpower_original);
H_BB=H_BB_ALL(1:N,1:Nr,loop)/sqrt(noise_maxpower_original);
H_UU=H_UU_ALL(1,1:K,loop)/sqrt(noise_maxpower_original);
H_UUr=H_UUr_ALL(1,1:Kr,loop)/sqrt(noise_maxpower_original);
H_UUt=H_UUt_ALL(1,1:Kt,loop)/sqrt(noise_maxpower_original);
%clear Phi_1 Phi_2 Phi_i3 Phi_4 Phi_6 W_1 W_3
%%%%% Initialize Fi for different mode(ES,MS and TS ) %%%%%%%%%%%%%%%
%%%%% ES妯″紡鍙傛暟鍒濆鍖? %%%%%%%%%%%%%%%
Phi_temp=randn(2,M) + sqrt(-1)*randn(2,M);
Phi_tamp=rand(1,M);
Phi_ramp=1-Phi_tamp;
Angle=rad2deg(angle(Phi_temp));
Angle(Angle<0)=Angle(Angle<0)+360;
Ang=deg2rad(Angle);
Phi_amp=[sqrt(Phi_tamp) ;sqrt(Phi_ramp)];%骞呭害鍒濆鍖?
Phi_ini_ES=Phi_amp.*exp(1j*Ang);%/sqrt(trans_maxpower/(M*K));%骞呭害鍒濆鍖栵紝鍧囧寑鍒嗗竷
Phi_ini_eES=sqrt(0.5).*exp(1j*Ang);%骞呭害鍚勪负0.5,_equal_ES.
Phi1(:,:,1)=full(Phi_ini_ES);%ESmode涓嬬殑Fi杩唬鍊?
%Phi4(:,:,1)=full(Phi_ini_eES);%equalESmode涓婩i鐨勮凯浠e??
%%%%% MS妯″紡鍙傛暟鍒濆鍖? %%%%%%%%%%%%%%%
Phi_Mtemp=randn(2,M1) + sqrt(-1)*randn(2,M1);
Phi_Mtamp=rand(1,M1);
Phi_Mramp=1-Phi_Mtamp;
Phi_Mamp=[sqrt(Phi_Mtamp) ;sqrt(Phi_Mramp)];
Angle2=rad2deg(angle(Phi_Mtemp));
Angle2(Angle2<0)=Angle2(Angle2<0)+360;
Ang2=deg2rad(Angle2);
Phi_ini_MS=Phi_Mamp.*exp(1j*Ang2);
Phi2(:,:,1)=full(Phi_ini_MS);
%%%%% TS妯″紡鍙傛暟鍒濆鍖? %%%%%%%%%%%%%%%
Phi_ini_TS=exp(1j*Ang);
Phi3(:,:,1)=full(Phi_ini_TS);
%%%%% conventional RIS鍙傛暟鍒濆鍖? %%%%%%%%%%%%%%%
%Phi_ini_cRIS=exp(1j*angle(Phi_Mtemp));
%Phi6(:,:,1)=full(Phi_ini_cRIS);
%%%%% Initialize W %%%%%%%%%%%%%%%
W_ini=randn(N,K)*sqrt(down_maxpower/(N*K));
W1(:,:,1)=full(W_ini);
W3(:,:,1)=full(W_ini);
%%%%% Initialize F %%%%%%%%%%%%%%%
F_ini=randn(K,Nr)*sqrt(up_maxpower/(K*Nr))+1i*randn(K,Nr)*sqrt(up_maxpower/(K*Nr));
F1(:,:,1)=full(F_ini);
F3(:,:,1)=full(F_ini);
%%%%% Initialize a %%%%%%%%%%%%%%%
a_ini=randn(1,K)*sqrt(down_maxpower/(1*K));
a(:,1)=full(a_ini);
%%%%% Initialize uplink MMSE variable %%%%%%%%%%%%%%%
u_up(:,1)=ones(1,K);
%%%%% Initialize downlink MMSE variable %%%%%%%%%%%%%%%
u_dwn(:,1)=ones(1,K);
And this is my code.
function [W_opt,flag] = Generate_ESMS_trans_beamforming(cof,cof_L, N,Nr, M, K,Kr,Kt, H_IB, …
H_BI,H_BB,H_UU,H_IU, H_UI,H_IE,H_UIr,H_UIt,H_IUr,H_IUt,H_UUr,H_UUt, …
W_ini, F_ini, Phi_ini,u_up_ini,u_dwn_ini, …
noise_maxpower, down_maxpower,up_maxpower)
cvx_begin %quiet
%cvx_solver mosek
variable W(N,K) complex
%expressions ;
for k=1:1:K
for kr=1:1:Kr
for kt=1:1:Kt
%%%%%up MMSE %%%%%%
up_users_t(kt,:)=diag(H_UI(kt,:))*Phi_ini(1,:)';
up_users_r(kr,:)=diag(H_UI(Kt+kr,:))*Phi_ini(2,:)';
%%%%%%down MMSE%%%%%%%
dwn_users_t(kt,:)=Phi_ini(1,:)*diag(H_IU(:,kt))*H_BI(:,:);
dwn_users_r(kr,:)=Phi_ini(2,:)*diag(H_IU(:,Kt+kr))*H_BI(:,:);
up_SI_t(kt)=Phi_ini(1,:)*diag(H_IU(:,kt))*H_UI(kt,:)';%co-channel interference of MMSE
up_SI_r(kr)=Phi_ini(2,:)*diag(H_IU(:,Kt+kr))*H_UI(Kt+kr,:)';
end
end
if(k<=Kt)
Phi_init(k,:)=Phi_ini(1,:);
H_eve(:,k)=H_IE(:,1);
P=Kt;
I=0;
elseif((k>Kt)&&(k<=K))
Phi_init(k,:)=Phi_ini(2,:);
H_eve(:,k)=H_IE(:,2);
P=Kr;
I=Kt;
end
%%%%%%%%generate downlink MMSE expression%%%%%%%%%%%
dwn_all_users=sum(dwn_users_t)+sum(dwn_users_r);%K*N dims
dwnlk_ch(k,:)=u_dwn_ini(k)*dwn_all_users;%downlink term of downlink MMSE
dwnlk_poly(:,:)=dwnlk_ch(k,:)'*dwnlk_ch(k,:);
%dwnlk(k)=sum(W(:,L)'*dwnlk_poly(k)*W(:,L));
dwnlk_ini(k)=sum(W_ini,2)'*dwnlk_poly(:,:)*sum(W_ini,2);
real_ch(k,:)=u_dwn_ini(k)*Phi_init(k,:)*diag(H_IU(:,k))*H_BI(:,:);
%dwn_real_part(k)=2*real(real_ch(k,:)*W(:,k));
dwn_real_part_ini(k)=2*real(real_ch(k,:)*W_ini(:,k));
%%%%constant in downlink MMSE %%%%%%%%
LI_ch(k)=noise_maxpower+cof_L(k)*up_maxpower*H_UU(k)*H_UU(k)';
LI(k)=LI_ch(k)*u_dwn_ini(k)*u_dwn_ini(k)';%loop interference
up_SI_sum=sum(up_SI_t)+sum(up_SI_r);
dwnSI_ch(k)=u_dwn_ini(k)'*up_SI_sum;%co-channel interference of MMSE, constance with respect to W
dwnSI_poly(k)=cof(k)*up_maxpower*sum(dwnSI_ch(k)*dwnSI_ch(k)');
dwnSI_ini(k)=sum(W_ini,2)'*dwnSI_poly(k)*sum(W_ini,2);
%dwnSI(k)=u_dwn_ini(k)'*dwnSI_poly(k)*u_dwn_ini(k);
%%%%function in downlink MMSE %%%%%%%%
%dwn_e(k)=dwnlk(k)+dwn_real_part(k)+real(LI(k)+dwnSI(k))+1;%error:complex+complex constant
%dwn_cons(k)=real(LI(k)+dwnSI(k))+1;
dwn_aux_var(k)=1/(dwnlk_ini(k)-dwn_real_part_ini(k)+LI(k)+dwnSI_ini(k)+1);
dwn_quad_matrix(:,:)=dwnlk_poly(:,:);
dwnlk(:,:)=dwn_aux_var(k).*dwn_quad_matrix(:,:);
dwn_real(k,:)=-dwn_aux_var(k)*real_ch(k,:);
%dwn_r(k)=log(abs(dwn_aux_var(k)))-real(dwn_aux_var(k))*dwn_e(k)+1;%error:complex*complex constant
%%%%%%%%%%end%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%generate uplink MMSE expression%%%%%%%%%%%%%
up_all_users=sum((up_users_r),1)+sum((up_users_t),1);
upLI_ch(:,k)=u_up_ini(k)*H_BB(:,:)*F_ini(k,:)';
upLI_poly(:,:)=upLI_ch(:,k)*upLI_ch(:,k)';
%upLI(k)=sum(W(:,L)'*upLI_poly(k)*W(:,L));
upLI_ini(k)=sum(W_ini,2)'*upLI_poly(:,:)*sum(W_ini,2);
upSI_ch(:,k)=u_up_ini(k)*H_BI(:,:)'*H_IB(:,:)'*F_ini(k,:)';
upSI_poly(:,:)=upSI_ch(:,k)*upSI_ch(:,k)';
%upSI(k)=sum(W(:,L)'*upSI_poly(k)*W(:,L));
upSI_ini(k)=sum(W_ini,2)'*upSI_poly(:,:)*sum(W_ini,2);
%%%%constant in uplink MMSE %%%%%%%%
upBS_ch(k,:)=u_up_ini(k)*up_all_users;%%%BS recieved users signal
upBS_poly(k)=up_maxpower*upBS_ch(k,:)*upBS_ch(k,:)';
up_real_part(k)=sqrt(up_maxpower)*u_up_ini(k)*F_ini(k,:)*H_IB(:,:)*diag(H_UI(k,:))*Phi_init(k,:)';
up_real(k)= 2*real(up_real_part(k));
nis(k)=noise_maxpower*u_up_ini(k)*u_up_ini(k)*F_ini(k,:)*F_ini(k,:)';
%%%%function in downlink MMSE %%%%%%%%
up_quad_matrix(:,:)=upLI_poly(:,:)+upSI_poly(:,:);
%x(k)=(upLI_ini(k)+upSI_ini(k)+up_real(k)+upBS_poly(k)+nis(k));
up_aux_var(k)=1/(upLI_ini(k)+upSI_ini(k)-up_real(k)+upBS_poly(k)+nis(k));
uplk(:,:)=up_aux_var(k).*up_quad_matrix(:,:);
%up_r(k)=log(abs(up_aux_var(k)))-real(up_aux_var(k))*up_e(k)+1;%error:invalid-convex. solve:delete constant
%updwn_cons(k)=log(abs(dwn_aux_var(k)))+log(abs(up_aux_var(k)))+2;
%%%%%%%%%end%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%generate quadrtic transform of dwn eve %%%%%%%%%%%%%
for p=1:1:P
W_init=W_ini;
W_init(:,k)=[];
W_selt=W;
W_selt(:,k)=[];
H_selt=H_UI;
H_selt(k,:)=[];
dwn_evenum_ch(k,:)=Phi_init(k,:)*diag(H_eve(:,k))*H_BI(:,:);%nomonator of up eve rate
dwn_evenum_poly(:,:)=dwn_evenum_ch(k,:)*dwn_evenum_ch(k,:)';
dwn_evenum_ini(p+I)= W_ini(:,p+I)'*dwn_evenum_poly(:,:)*W_ini(:,p+I);
%eve(k)=sum(W(:,L)'*eve_poly(k)*W(:,L));
dwn_evedom1_ini(k)= sum(W_init,2)'*dwn_evenum_poly(:,:)*sum(W_init,2);
dwn_evedom2_ch=sum(Phi_init(k,:)*diag(H_eve(:,k))*H_UI(k,:)');
dwn_evedom2_ini=up_maxpower*dwn_evedom2_ch*dwn_evedom2_ch;
dwn_evedom_ini(k)=dwn_evedom1_ini(k)+dwn_evedom2_ini+noise_maxpower;
coef_dwneve(k)=dwn_evedom_ini(k)/(dwn_evedom_ini(k)+dwn_evenum_ini(p+I));
y_dwneve(k)=-sqrt(dwn_evenum_ini(p+I))/dwn_evedom_ini(k);
dwneve_matrix(:,:)=((1/3)*y_dwneve(k)*y_dwneve(k)*coef_dwneve(k)).*dwn_evenum_poly(:,:);
dwneve_real(k,:)=((1/3)*y_dwneve(k)*coef_dwneve(k)).*dwn_evenum_ch(k,:);
%%%%%%%%%end%%%%%%%%%%%%
%%%%%%%generate quadrtic transform of up eve%%%%%%%%%%%%%
up_evenum_ch(k)=Phi_init(k,:)*diag(H_eve(:,k))*H_UI(k,:)';
up_evenum_poly(k)=up_maxpower*up_evenum_ch(k)*up_evenum_ch(k);
up_evedom1_ch(k,:)=Phi_init(k,:)*diag(H_eve(:,k))*H_BI(:,:);
up_evedom1_poly(:,:)=up_evedom1_ch(k,:)'*up_evedom1_ch(k,:);
up_evedom1_ini(k)=sum(W_ini,2)'*up_evedom1_poly(:,:)*sum(W_ini,2);
up_evedom2_ch(k)=Phi_init(k,:)*diag(H_eve(:,k))*sum(H_selt,1)';
up_evedom2_poly(k)=up_maxpower*up_evedom2_ch(k)*up_evedom2_ch(k);
up_evedom_ini(k)=up_evedom1_ini(k)+up_evedom2_poly(k)+noise_maxpower;
coef_upeve(k)=up_evedom_ini(k)/(up_evenum_poly(k)+up_evedom_ini(k));
y_upeve(k)=-sqrt(up_evenum_poly(k))/up_evedom_ini(k);
upeve_matrix(:,:)=((1/3)*y_upeve(k)*y_upeve(k)*coef_upeve(k)).*up_evedom1_poly(:,:);
%%%%%%%%%%end%%%%%%%%%%%%%
W_init=W_ini;
W_selt=W;
H_selt=H_UI;
end
final_matrix(:,:)=dwnlk(:,:)+uplk(:,:);
A_matrix(:,:)=0.5.*(final_matrix(:,:)+final_matrix(:,:)')
B_matrix(:,:)=0.5.*(dwneve_matrix(:,:)+dwneve_matrix(:,:)');
C_matrix(:,:)=0.5.*(upeve_matrix(:,:)+upeve_matrix(:,:)');
B_real(k,:)=dwn_real(k,:)+dwneve_real(k,:);
D_matrix(:,:)=A_matrix(:,:)+B_matrix(:,:)+C_matrix(:,:)
%%%%%final objective function%%%%
poly1(k)=W(:,k)'*A_matrix(:,:)*W(:,k);%%%%噪声功率太小就会导致
poly2(k)=sum(W_selt,2)'*B_matrix(:,:)*sum(W_selt,2);
poly3(k)=sum(W,2)'*C_matrix(:,:)*sum(W,2);
%poly_all(k)=(poly1(k)+poly2(k)+poly3(k))%如何把这三个多项式写成一个
poly(k)=-poly1(k)-2*real(B_real(k,:)*W(:,k));%%%窃听用户的负号记得加上
end
maximize sum(poly)
subject to
pow_pos(norm(W,'fro'),2)<=down_maxpower;
cvx_end
if cvx_status(1)==‘S’ || cvx_status(3)==‘a’
flag=1;
W_opt=W;
else
flag=0;
W_opt=ones(N,K);
end
end
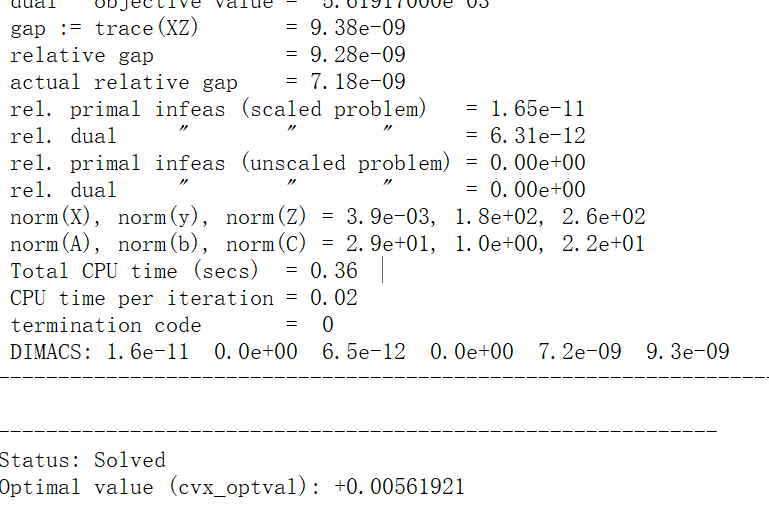
But when I let the input parameter noise_maxpower_original up to 10^((-40-30) / 10). It can magically solved. Please help me to figure it out. Gratefully thanks.