Hi,
I’ve been trying to understand and generalize a piece of code which is one of the examples in the tutorial of CVX for Python, but I don’t completely understand the code, and Google hasn’t been very useful.
The particular problem is how to solve a semidefinite program for A-optimality (Boyd’s book, Section 7.5), and the program is as follows (given here Experiment design (fig. 7.9-7.11) — CVXOPT):
A-design.
minimize tr (V*diag(x)*V’)^{-1}
subject to x >= 0
sum(x) = 1equivalent to:
minimize tr Y
subject to [ V*diag(x)*V’, I ]
[ I, Y ] >= 0
x >= 0
sum(x) = 1
The code in the example can be found in the previous URL.
In that case the dimension of the points is 2, and the number of points is 20.
I just want to generalize to any number of points n, and any dimension d.
I don’t understand why the dimension of the matrix Gs is 16 there, and how/why the -1’s are introduced in those positions.
My best attempt for my generalization was:
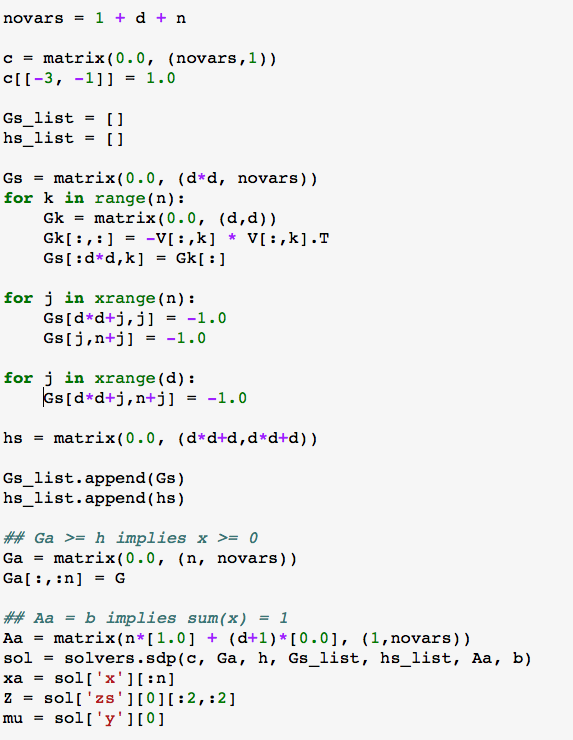
I don’t know why the number of variables needs to include an “extra” dimension.
The error I get when I try to solve the problem with the previous code is the squareroot of the number of rows in ‘Gs[1]’ is not an integer, but I don’t understand why Gs should have a squared number of rows as from
minimize tr Y
subject to [ V*diag(x)*V’, I ]
[ I, Y ] >= 0
it is not obvious.
Thanks!