Hey!
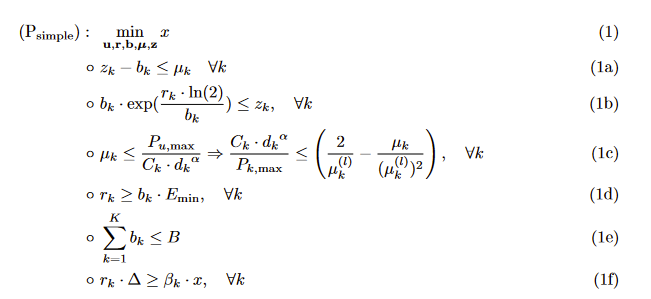
I’m currently working on solving the following problem. Here I use successive convex aproximation of the function 1/mu in constraint (1c).
Until now, the problem in CVX only converges if I use Mosek at default (not best) precision. Is there a reason why solvers like sedumi or sdpt3 are not converging?
I tried to simulate the problem from this post which also uses exponential sets, and it worked with all solvers.
Thanks in advance,
Markus K
clear;
close all;
% === Simulation constant parameter ===
K = 2; % Number of ground user
delta = 40*1e-3; % Time slot duration [s]
V_max = 70; % Maximum velocity [m/s]
A_0 = db2pow(-30); % [dB]
sigma_n = sqrt(db2pow(-90) * 1e-3); % [dB]
kappa_m = 1e6;
B = 1e06 ; % Bandwidth [Hz]
E_min = db2pow(0); % Minimum energy level fronthaul channel [dB]
P_kmax = ones(1, K) * db2pow(23) * 1e-3; % Maximum power for each user [dB]
D = 0.5 * 1e06; % Amount of data [bit]
Q_max = (K + 1) * 100 * D; % Maximum buffer capacity [bit]
sigma = 1;
theta_channel = rand(K, 1) * 2*pi;
h_k = sqrt(kappa_m /(kappa_m + 1)) * sigma .* exp(1i * theta_channel) ...
+ sqrt(1/(kappa_m + 1)) * randn(1, 1, "like", 1i) .* sigma;
% === Simulation location parameter ===
height_uav = 100;
GU_pos = randn(2,K);
GU_pos = [25, 25; 15, 5; 0, 0];
beta_k = [1; 1];
% === Local parameter for simulation ===
iter_max = 30;
mu_k_sca_last = ones(2, 1);
for iter_sca = 1: iter_max
% === CVX - Problem ===
cvx_begin
cvx_solver sedumi;
% cvx_solver sdpt3;
% cvx_solver mosek;
cvx_precision low
% Optimization variables
variable u_pos(2, 1) nonnegative %
variable r_k(K, 1) nonnegative % Channel capacity (fronthaul channel)
variable b_k(K, 1) nonnegative % Bandwidth of the channel (fronthaul channel)
variable mu_k(K, 1) nonnegative % Slack variables
variable z_k(K, 1) nonnegative
variable x nonnegative;
maximize(x)
% == Constraints ==
subject to
% C3a -
z_k <= mu_k+ b_k;
for k = 1:K
% => Version with exponential set {(x, y, z) | y > 0, y*exp(x/y) <= z }
% b_k .* exp((r_k .* log(2))./b_k) <= z_k
{r_k(k) * log(2), b_k(k), z_k(k)} == exponential(1);
% => Version with relative entropy {rel_entr(x, y) = x*log(x/y)}
% r_k(k) * log(2) + rel_entr(b_k(k), z_k(k)) <= 0;
% C3b -
GU_num = 2;
C_k = sigma_n^2/(A_0 * abs(h_k(k))^2);
C_k * pow_pos(norm([u_pos; height_uav] - GU_pos(:, k)), 2) - P_kmax(k)*(2/mu_k_sca_last(k) - mu_k(k)/mu_k_sca_last(k)^2) <= 0;
end
% C4 - total bandwidth for all channels
sum(b_k(:)) <= B;
% C5 - mimumum SNR ???
r_k >= b_k * E_min;
% C8 - data volume
r_k .* delta >= beta_k .* x;
cvx_end
% === update SCA ===
mu_k_sca_last = mu_k;
end
Further expanding on @Erling 's post, which was being written at the same time as mine:
Mosek is the best solver to use for this problem. CVX 2.2 uses Mosek’s native exponential cone capability. The other solvers cause CVX’s much more unreliable Successive Approximation method to be used. That said, unsafeguarded (no line search or trust region) SCA is a very unreliable algorithm.
Always stick with the default precision, regardless of which solver is called.
Thanks to both of you!
I’m just a bit confused, since in another project they had to use the sdpt3 solver and could not use Mosek to solve the more complex optimization problem.
In general, would it be better to use an exponential set or reformulate the constraints and use something like the relative entropy function? As described in the following post.
Once CVX 2.2 became available (with Mosek 9.x or 10.x)), use of Mosek became the preferred way of solving problems involving exponential cone functions (log, exp, entr, rel_entr, exponential sets, and some others)… You are looking at some very old posts which predate all options other than CVX’s unreliable Successive Approximation method.