Hi,
I have been trying to code the objective and constraints, but I am currently facing a “Failed” status. In the following, I will attempt to explain my code and the main problem. I would greatly appreciate your help, as I have been stuck on this for the past four days since my last message. Thank you very much for your time.
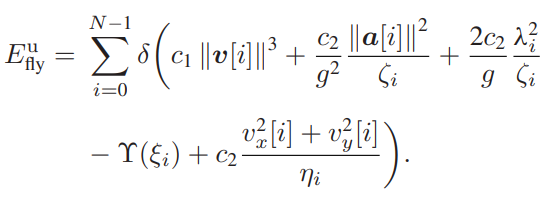
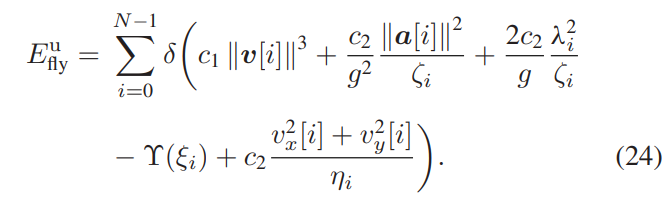
here is Main Optimization Problem:
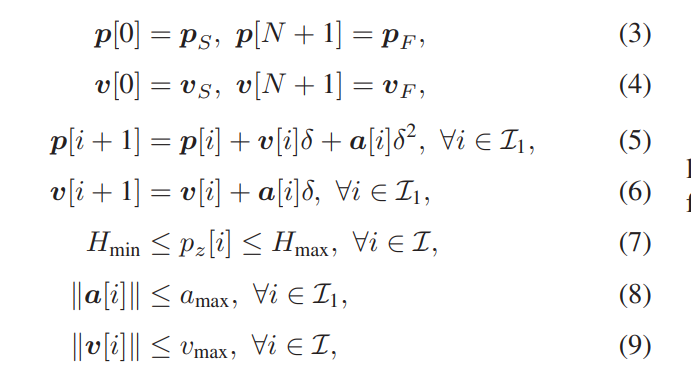
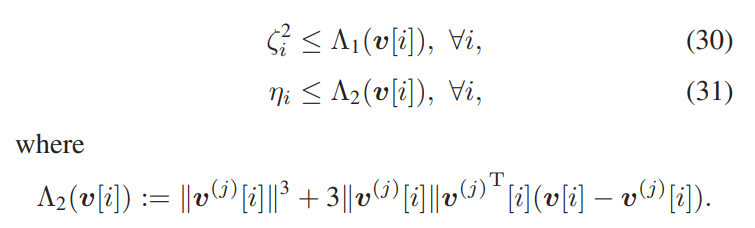
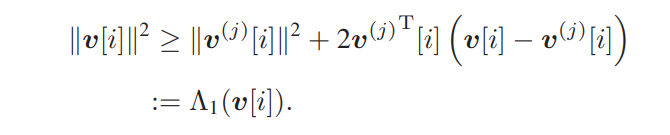
and here are Constraints and expressions:

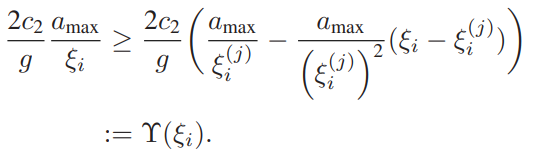
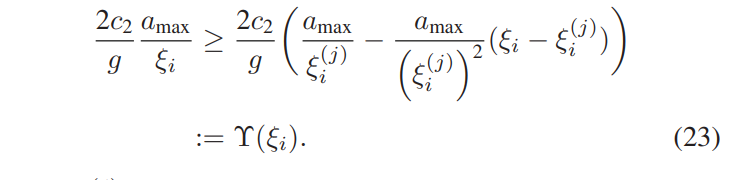
where Aux2 in my code is:
This is Optimization Problem kse, zeta and eta are Auxiliary variables. all parameters which declared with j index are local points( given points) As I did not get Solved Status I didn’t Iterate to get optimized point to use in next iteration I just Use randi(matlab Function) to generate local points.
Here is my code:
tic
warning off
clc
clear
close all
format short g
Define parameters and constants
c1 = 9.26e-4;
c2 = 2250;
kc = 0.017;
alpha = 1334;
Emax = 20000; % Maximum Battery Capacity in Joule
EI = 2000; % Initial Battery Capacity in Joule
Ef = 2000; % The Lowest Final Battery Energy in Joule
qI = [1000;0;100]; % Initial Position Of UAV
qF = [0;1000;100]; % UAV Return to its Initial Point
vI = [25;25;25]; % UAV Initial Velocity
vF = vI; % UAV Final Velocity
vmin = 3; % Minimum Speed Of UAV
vmax = 50; % Maximum Speed Of UAV
amax = 5; % Maximum Accelration
Hmin = 50; % Minimum Alititude Of UAV
Hmax = 1800; % Maximum Alititude Of UAV
teta = 15; % Maximum Pitch Angle Of UAV
T = 220; % The Flight Duration Of UAV
delta = 0.1; % Time Slot Duration
sigma = 10 ^ ((-90 - 30) / 10); % Noise Power in watt
g0 = db2pow(-50); % Refernce Channel Gain
B = 10; % System Bandwidth
b1 = 20; % Probabilistic Channel Parameter
b2 = 0.15; % ...
mu = 0.1; % ...
qk = [150,350,0; % Smart Devices Location
400,120,0;
50,100,0;
450,450,0;
250,0,0]';
% Round - Robin Channel Pameters
Pk = 50; % Transmission Power Of SD
% Los Channel Parameters
Pkmax = 100; % UAV Transmission Power
Etotal = 2.2; % Total Energy For SD in Joule
Initialize Parameters
N = 100; % Duration Of Flight
K = 5;
tau = delta/K;
qx = randi([-500,2000],1,N+1);
qy = randi([-550,950],1,N+1);
qz = randi([50,1800],1,N+1);
vx = randi([80,100],1,N+1);
vy = randi([80,100],1,N+1);
vz = randi([80,100],1,N+1);
ax = randi([1,5],1,N+1);
ay = randi([1,5],1,N+1);
az = randi([2,4],1,N+1);
q0 = [qx;qy;qz];
a0 = [ax;ay;az];
v0 = [vx;vy;vz];
lan0 = az + amax;
kse0 = vecnorm(v0);
Ps0 = randi([50,550],1,N+1);
Variables Declare
cvx_clear
cvx_begin
variable q(3,N+1) % This is p which I Defined as q
variable v(3, N+1)
variable a(3, N+1)
variable kse(1,N+1)
variable zeta(1,N+1)
variable eta(1,N+1)
variable landa(1,N+1)
v0norm = vecnorm(v0);
Lower and Upper bounds
for n = 1:N+1
Aux2(n) = 2*c2*0.10204*(amax/kse0(n) - amax*(kse(n) - kse0(n))/kse0(n)^2); % Upper Bound Od Kse eq.23
Aux3(n) = v0norm(n)^2 + 2*v0(:,n)'*(v(:,n)-v0(:,n)); % Taylor Series for ||V||^2
Aux4(n) = v0norm(n)^3 + 3*v0norm(n)*v0(:,n)'*(v(:,n)-v0(:,n)); % Taylor Series for ||V||^3
end
Objective Function
E = 0;
for n = 1:N
efly = delta*(c1*pow_pos(norm(v(:,n)),3) + c2*0.0104*quad_over_lin(a(:,n),zeta(n)) ...
+ 2*c2*0.1*quad_over_lin(landa(n),zeta(n)) - Aux2(n) +c2*quad_over_lin(v(1,n),eta(n)) + c2*quad_over_lin(v(2,n),eta(n)));
E = E + efly;
end
minimise(E)
subject to
q(:,1) == qI; % C3
q(:,end) == qF; % C3_1
v(:,1)==vI; % C4
v(:,end)==vF; % C4_1
q(:,2:end) == q(:,1:end-1) + delta * v(:,1:end-1) + 0.125 * a(:,1:end-1); % C5
v(:,2:end) == v(:,1:end-1) + delta * a(:,1:end-1); % C6
50 <= q(3,:); % C7
q(3,:) <= 500; %C7
for n = 1:N+1
norm(a(:,n)) <= amax; % C8
norm(v(:,n)) <= vmax; % C9
vmin <= zeta(n); % C21a
vmin^3 <= eta(n);% C21a
norm(v(:,n)) <= kse(n) %C21b
end
a(3,:) + amax <= lan0.^2 + 2*lan0.*(landa - lan0); % C26
for n=1:N+1
pow_abs(v(3,n),2) <= sin(deg2rad(teta)) * Aux3(n); % C28
pow_p(zeta(n),2) <= Aux3(n) % C30
eta(n) <= Aux4(n); %C31
end
cvx_end
and here is CVX Output:
Calling SDPT3 4.0: 5730 variables, 2206 equality constraints
For improved efficiency, SDPT3 is solving the dual problem.
------------------------------------------------------------
num. of constraints = 2206
dim. of sdp var = 1404, num. of sdp blk = 702
dim. of socp var = 2112, num. of socp blk = 503
dim. of linear var = 1310
dim. of free var = 202 *** convert ublk to lblk
*******************************************************************
SDPT3: Infeasible path-following algorithms
*******************************************************************
version predcorr gam expon scale_data
HKM 1 0.000 1 0
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
-------------------------------------------------------------------
0|0.000|0.000|1.8e+06|3.6e+01|8.1e+14|-6.175141e+12 0.000000e+00| 0:0:00| spchol 1 1
1|0.000|0.000|1.8e+06|3.6e+01|8.1e+14|-6.175140e+12 -2.172981e+06| 0:0:00| spchol 1 2
2|0.000|0.000|1.8e+06|3.6e+01|8.1e+14|-6.175135e+12 -1.370265e+07| 0:0:00| spchol 1 2
3|0.000|0.000|1.8e+06|3.6e+01|8.1e+14|-6.175130e+12 -3.586628e+07| 0:0:00| spchol 1 1
4|0.000|0.000|1.8e+06|3.6e+01|8.1e+14|-6.174936e+12 -1.380077e+08| 0:0:00|
*** Too many tiny steps: restarting with the following iterate.
*** [X,y,Z] = infeaspt(blk,At,C,b,2,1e5); spchol 2 2
5|0.741|0.036|5.9e+06|9.8e-01|3.0e+13|-2.374843e+14 -2.651117e+08| 0:0:00| spchol 2 2
6|0.575|0.004|2.5e+06|9.8e-01|3.1e+15|-7.671823e+18 -3.220682e+08| 0:0:00| spchol 2 2
7|0.006|0.000|2.5e+06|9.8e-01|1.2e+19|-2.975510e+23 -1.295791e+09| 0:0:00| spchol * 3 3
8|0.000|0.000|2.5e+06|9.8e-01|5.8e+21|-1.716890e+26 -7.103767e+10| 0:0:00| spchol 1 * 3
9|0.000|0.000|2.5e+06|9.8e-01|3.6e+23|-1.056943e+28 -5.382841e+11| 0:0:00|
sqlp stop: primal or dual is diverging, 1.1e+16
-------------------------------------------------------------------
number of iterations = 9
Total CPU time (secs) = 0.48
CPU time per iteration = 0.05
termination code = 3
DIMACS: 3.5e+07 0.0e+00 7.7e+00 0.0e+00 -1.0e+00 3.4e-05
-------------------------------------------------------------------
------------------------------------------------------------
Status: Failed
Optimal value (cvx_optval): NaN
I sincerely appreciate your assistance with my coding challenges. Thank you for taking the time to help me.