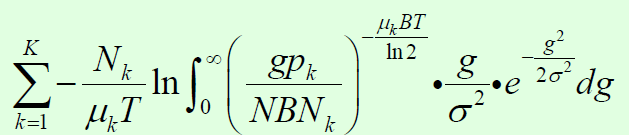
Hi,everyone.I'm looking for a function to discribe integral in CVX.Maybe my problem is too complex ,I haven't found method to solve it.
function [ x1 x2 x3 x4 x5 x6 x7 x8 ] = MYcvx1()
A=0.1;
T=10^-3;
N=10^-4;
B=15000;
d=0.1;
%In High-SNR Situation
cvx_begin
variable x1
variable x2
variable x3
variable x4
variable x5
variable x6
variable x7
variable x8
E1=@(g,x1,x5)1./(log(2).*N).*rel_entr(g.*x5,N.*B.*x1)+x1.*g.^2./(A.*T.*2.*d.^2).*log(g./d.^2);
Q1=integral(@(g)E1(g,x1,x5),0,inf);
E2=@(g,x2,x6)1./(log(2).*N).*rel_entr(g.*x6,N.*B.*x2)+x2.*g.^2./(A.*T.*2.*d.^2).*log(g./d.^2);
Q2=integral(@(g)E2(g,x2,x6),0,inf);
E3=@(g,x3,x7)1./(log(2).*N).*rel_entr(g.*x7,N.*B.*x3)+x3.*g.^2./(A.*T.*2.*d.^2).*log(g./d.^2);
Q3=integral(@(g)E3(g,x3,x7),0,inf);
E4=@(g,x4,x8)1./(log(2).*N).*rel_entr(g.*x8,N.*B.*x4)+x4.*g.^2./(A.*T.*2.*d.^2).*log(g./d.^2);
Q4=integral(@(g)E4(g,x4,x8),0,inf);
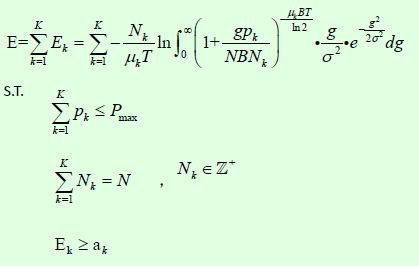
maximize(Q1+Q2+Q3+Q4)
subject to
Q1>=50000;
Q2>=50000;
Q3>=50000;
Q4>=50000;
x1+x2+x3+x4==40;
x5+x6+x7+x8==20;
x1>=0;
x2>=0;
x3>=0;
x4>=0;
x5>=0;
x6>=0;
x7>=0;
x8>=0;
cvx_end
end
Error using integralCalc/finalInputChecks (line 511)
Input function must return ‘double’ or ‘single’ values. Found ‘cvx’.
Error in integralCalc/iterateScalarValued (line 315)
finalInputChecks(x,fx);
Error in integralCalc/vadapt (line 132)
[q,errbnd] = iterateScalarValued(u,tinterval,pathlen);
Error in integralCalc (line 83)
[q,errbnd] = vadapt(@AToInfInvTransform,interval);
Error in integral (line 88)
Q = integralCalc(fun,a,b,opstruct);
Error in MYcvx1 (line 19)
Q1=integral(@(g)E1(g,x1,x5),0,inf);
Hope to your rely.
Sincerely
JackEI