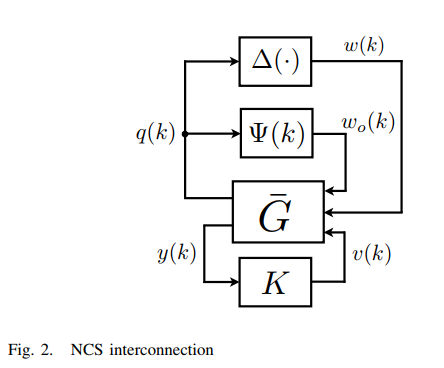
Hi, I have a problem which i don’t know how can i model the network control system with matlab as m.file. in this problem all of system are in discrete time domain: A1 = [1.1 1;0 1.2] ; B1 = [0 ;1] ; C1 = [1 0] G¯ :x(k + 1) = Ax(k) + Bµv(k) + Bµw(k)+Bµwo(k); y(k) = Cx(k); and controller achieved from an LMI condition and is : K : xk(k + 1) =Ak xk(k) +Bk y(K) v(K) = Ck xk(K) + Dk y(k); K1 = −1.2458(z − 1:012)(z − 0:5753)/(z − 0:5478)(z + 0:997)
uncertainty block is : ∆(·) is a nonlinear operator. We assume that ∆(0) = 0 is the unique equilibrium point and define the infinity norm of ∆(·) as : And sai(k) is Ψ(k) = (Φ(k) − µ)/µ which E{Φ(k)} = µ and µ (0; 1] and Φ(k) is where Φ(k) is an i.i.d.(independent and identically distributed) Bernoulli process.
I don’t understand exactly what you’re asking, and I suspect no one else really would, either.
Nevertheless, you are apparently seeking modeling advice of a type not appropriate for this forum. if you get to the point of having a convex LMI or other optimization or feasibility model which deals with any uncertainty only within the context of one or more “deterministic” problems,l and need help in how to use CVX to handle it, then please feel free to request such assistance at that time.
Keep in mind, per Question about convex optimization , you can not use ureal from Robust Control Toolbox within CVX. You will have to to figure pout how to deal with uncertainty in an appropriate way, whether that ultimately involves using CVX or not.