clc
clear
close all;
%% Initialization of parameters & channel setup
K=5;%Number of users
Nru=2;%Number of RUs
N_pkts=randi([1 5],K,1);
w=N_pkts;
Tsls=zeros(K,1);
global ap_ant;
ap_ant=8;
M=ap_ant;
Nrx=8;
Pt_dB=30;%uplink transmit power in dBm
Pt=10^(Pt_dB/10);
%Path-loss at d0
d0=1;%in meters
c=3e8;%in m/s
fc=5e9;%in Hz
lambda=c/fc;
PL0=(lambda/(4pid0))^2;
PL0_dB=10*log10(PL0);
a=3.8;%pathloss exponent
dmax=20;%in meters
PL=zeros(1,K);
PL_dB=zeros(1,K);
d=zeros(1,K);
for k=1:K
d(k)=randi([2,dmax]);%user distance in meters
PL(k)=PL0*(d0/d(k))^a;
PL_dB(k)=10*log10(PL(k));%pathloss in dB
end
Kc=1.380649E-23;
T=290;%in kelvin;B=160e6;%MHz
N_sc=106;%Number of subcarriers in an RU
B_sc=78.125e3;%Subcarrier bandwidth
B_ru=N_scB_sc;
sigma2=KcTB_ru;
sigma2dB=10log10(sigma2*1e3);%%noise power in dBm
%channel matrix
%Y=zeros(Nru,K,K);N=zeros(Nru,K,K);n=zeros(K,Nru);
G=zeros(Nru,K,K);
%Generation of channel matrix
H=zeros(Nru,Nrx,K);
for r=1:Nru
for k=1:K
H(r,:,k)=(sqrt((PL(k))/2)).(randn(Nrx,1)+1irandn(Nrx,1));
end
end
% H=abs(H);
%% cvx solver
cvx_begin
cvx_solver mosek
variable y(K,Nru);
C2=;
C3=;
for r=1:Nru
for k=1:K
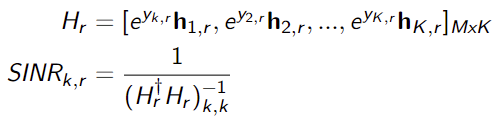
Hr=reshape(H(r,:,:),Nrx,K);
Xr=reshape(exp(y(1:K,r)),1,K);
XH=repmat(Xr,Nrx,1);
Heq=XH.*Hr;
Hi=real(inv(Heq’Heq));
SINR(k,r)=1/(sigma2(Hi(k,k)));
R(k,r)=log(1+SINR(k,r));
end
C3=[C3 sum(exp(y(k,:)))];
end
for r=1:Nru
C2=[C2;sum(exp(y(:,r)))];
end
maximize(sum(R(k,r)),“all”);
subject to
exp(y(:,:))<= ones(K,Nru);
C2<=M.*ones(Nru,1);
C3<=1.*ones(1,K);
cvx_end
exp(y)
I have verified the objective function and the constraints are convex and
I see the below error message.
Error using .*
Disciplined convex programming error:
Cannot perform the operation: {log-affine} .* {complex affine}
Error in zf_cvx_resource_allocation (line 70)
Heq=XH.*Hr;
Please help to find out if this is accepted in CVX?
If this is not accepted format, can you please suggest any other format to solve this?