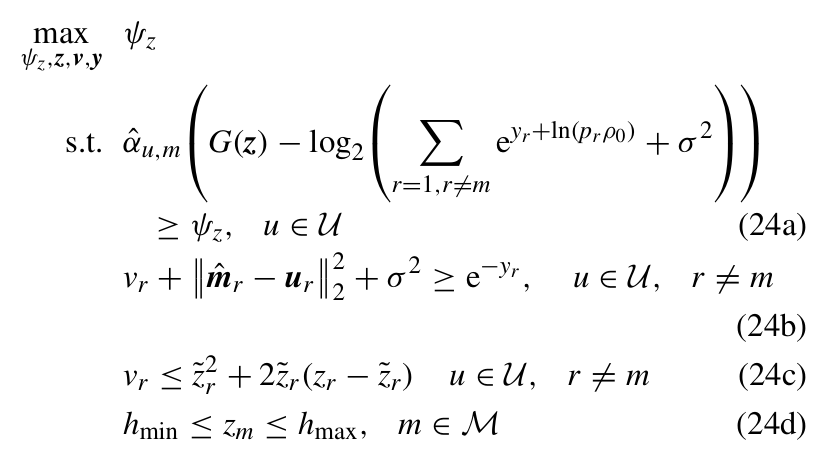
Hi, Mr. Stone and everyone. I still need help with the same question. Actually, I am solving an alternating optimization problem. However, I might have programmed this question incorrectly because my result is weird. The graph below is my result, which shows the achievable rate by inputting parameter (i.e., z, p) after each iteration, which I denoted as “Rg.”
When doing each optimization independently, the Rg increases and converges after serval iterations, but alternative optimization is different. I am unsure if the problem was due to my worse coding or related to the alternative optimization.
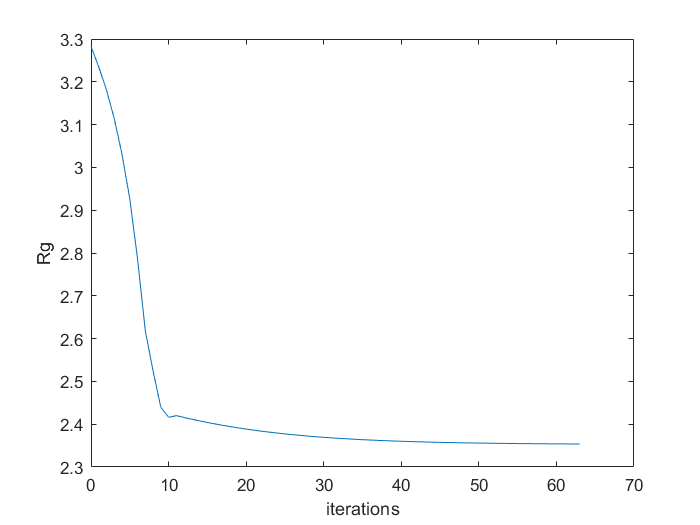
The objective value is an affine function so that I can maximize this problem, and the following should be enough to determine the convexity.
Altitude:
maximize (objective affine variable)
s.t.
-a*sum(z^2) - log_sum_exp(y) + C >= objective (constraint 24a)
affine >= affine or convex (constraints 24b,c,d)
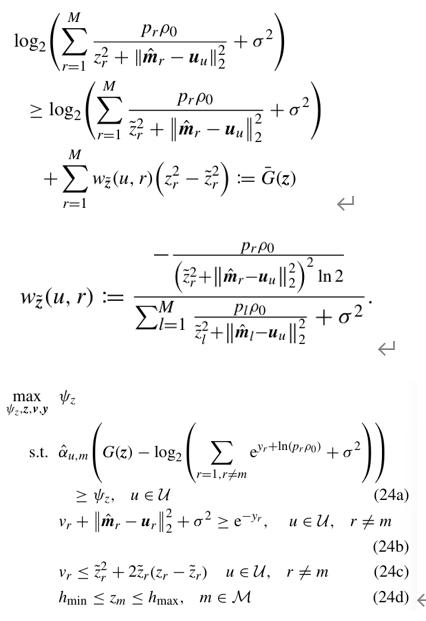
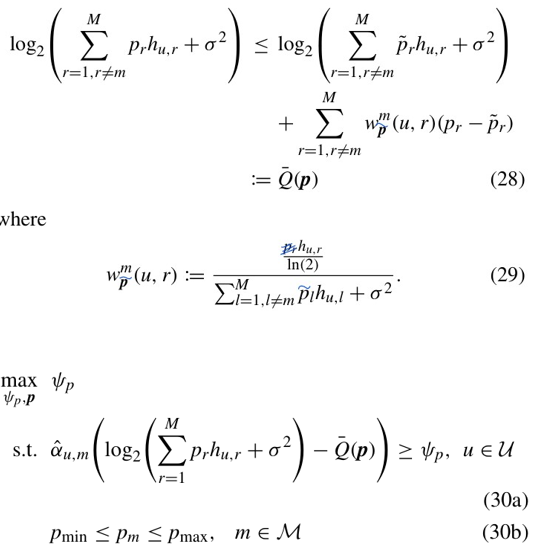
Power:
maximize (objective affine variable)
s.t.
log(x)-(b*sum(p) + C) >= objective (constraint 30a)
C <= z <=C (constraint 30b)
I believe 24a is valid because a is always a positive constant in -a*sum(z^2), which is convex, and log_sum_exp(y) is also convex, so -(a*z^2 + log_sum_exp(y)) is concave. Also, as x is always positive in 30a, the log(x) is concave. Therefore, I believe CVX can solve my problems.
The following is my full code and input data:
cvx_solver mosek
cvx_save_prefs
% problem constants
load('matlab_matrix_ideal_small.mat');
n = size(UAV,1); % number of transmitters and receivers
Pmin = 0.1*ones(1,n); % minimum power
Pmax = 1*ones(1,n); % maximum power
hmin = 50*ones(1,n); % minimum altitude
hmax = 200*ones(1,n); % maximum altitude
sigma = 10^(-120/10); % noise power % -90 or -100
rho = 10^(-30/10);
p = 0.5*ones(1,n);
z = 100*ones(1,n);
p_appr = p; % initial point
z_appr = z; % initial point
prio = 0;
% 0 == z frist -> p second
% 1 == p first -> z second
% no_iter = 4;
% no_tot_iter = 12;
max_iter = 100;
% For the convenient, we will use Ku_cover => [x, y, mth_UAV]
% comparsion and break
prev_psi_z = 0;
prev_psi_p = 0;
prev_Rg = 0;
epsilon = 1e-4;
% variables are power levels
tot_iter = 1;
result = [];
fin = 0; % when each iteration finished, fin = 2
disp("======================"+tot_iter+"========================")
while(1)
%% ========================== Altitude ====================================
if prio == 0 && fin ~= 2
disp("altitude loop...")
iter = 1;
prev_psi_z = 0;
while(1)
if iter > 1
z_appr = z;
end
%disp("altitude iteration: "+ iter);
w_st = [];
w_nd = [];
for u = 1:size(Ku_cover)
GT = Ku_cover(u, 1:2);
m = Ku_cover(u, 3)+1;
temp_w_st = [];
temp_w_nd = [];
for r = 1:size(UAV)
mUAV = UAV(r, 1:2);
temp_w_st = [temp_w_st -(p(r)*rho)/(power((power(z_appr(r),2)+power(norm(mUAV-GT),2)),2)*log(2))];
temp_w_nd = [temp_w_nd (p(r)*rho)/(power(z_appr(r),2)+power(norm(mUAV-GT),2))];
end
w_nd = cat(2, w_nd, (sum(temp_w_nd)+sigma)); % w_nd(u)
w_st = cat(3, w_st, temp_w_st); % w_st(:,r,u)
end
G_st = log(w_nd)/log(2); % G_st(u)
cvx_begin quiet
cvx_precision default
variable psi_z
variable z(1,n)
variable v(1,n)
variable y(1,n)
log_sum_exp_y = [];
for m = 1:size(UAV)
seq = [];
for r = 1:size(UAV)
if r ~= m
seq = [seq r]; % without m_th
end
end
log_sum_exp_y = cat(2, log_sum_exp_y, log(sum(exp(y(seq)+log(p(seq)*rho)))+sigma)/log(2) ); % log_sum_exp_y(m)
end
pow_z = power(z,2); % pow_z(m)
Ru = [];
for u = 1:size(Ku_cover)
m = Ku_cover(u,3)+1;
Ru = cat(2,Ru, G_st(u) + (w_st(:,:,u)/w_nd(u))*transpose(pow_z-power(z_appr,2)) - log_sum_exp_y(m) );
end
maximize psi_z
subject to
Ru >= psi_z;
for u = 1:size(Ku_cover)
GT = Ku_cover(u, 1:2);
m = Ku_cover(u, 3)+1;
for r = 1:size(UAV)
mUAV = UAV(r, 1:2);
if r ~= m
v(r) + power(norm(mUAV-GT),2) >= exp(-y(r));
end
end
end
for r = 1:size(UAV)
v(r) <= power(z_appr(r),2) + 2*z_appr(r)*(z(r)-z_appr(r));
end
hmin <= z <= hmax;
cvx_end
disp("optimal altitude: "); disp(psi_z);
% disp("objective improvement: "+ (psi_z-prev_psi_z));
if (abs(psi_z-prev_psi_z) < epsilon)
z_appr = z; % last update
break
else
prev_psi_z = psi_z;
if iter == max_iter
z_appr = z; % last update
break
end
end
iter = iter+1;
end
prio = 1; % switch to power optimization
fin = fin + 1; % Finish 1 optimization
end
%% =========================== Power ================================
if prio == 1 && fin ~= 2
disp("power loop...")
temp = 0;
iter = 1;
prev_psi_p = 0;
while(1)
%disp("power iteration: "+ iter);
if iter > 1
p_appr = p;
end
w_st = [];
w_nd = [];
for u = 1:size(Ku_cover)
GT = Ku_cover(u, 1:2);
m = Ku_cover(u,3)+1;
temp_w_st = [];
temp_w_nd = [];
for r = 1:size(UAV)
mUAV = UAV(r, 1:2);
if r ~= m
temp_w_st = [temp_w_st (rho/(power(z(r), 2) + power(norm(GT-mUAV),2)))/log(2)];
temp_w_nd = [temp_w_nd (p_appr(r)*rho)/(power(z(r), 2) + power(norm(GT-mUAV),2))];
else
temp_w_st = [temp_w_st 0];
end
end
w_st = cat(3, w_st, temp_w_st); % w_st(:,r,u)
w_nd = cat(2, w_nd, sum(temp_w_nd)+sigma ); % w_nd(u)
end
Q_st = log(w_nd)/log(2); % Q_st(u)
cvx_begin quiet
cvx_precision default
variable psi_p
variable p(1,n)
Ru = [];
for u = 1:size(Ku_cover)
GT = Ku_cover(u, 1:2);
m = Ku_cover(u, 3)+1;
h = [];
seq = [];
for r = 1:size(UAV)
mUAV = UAV(r, 1:2);
h = [h rho/(power(z(r), 2) + power(norm(GT-mUAV),2))]; % h(r)
if r ~= m
seq = [seq r]; % without m_th
end
end
Ru = cat(2, Ru, log(p*transpose(h)+sigma)/log(2)-( Q_st(u) + (w_st(:,seq,u)/w_nd(u))*transpose(p(seq)-p_appr(seq))) );
end
maximize psi_p
subject to
Ru >= psi_p;
Pmin <= p <= Pmax;
cvx_end
disp("optimal power: "); disp(psi_p);
% disp("objective improvement: "+ (psi_p-prev_psi_p));
if (abs(psi_p-prev_psi_p) < epsilon)
p_appr = p; % last update
break
else
prev_psi_p = psi_p;
if iter == max_iter
p_appr = p; % last update
break
end
end
iter = iter+1;
end
prio = 0;
fin = fin + 1;
end
%% ========================== Result Comparsion ============================= %
% comparison when finish both optimization
if fin == 2
Rg = [];
for u = 1:size(Ku_cover)
m = Ku_cover(u,3)+1;
GT = Ku_cover(u,1:2);
I = [];
for r = 1:size(UAV)
mUAV = UAV(r,1:2);
if r ~= m
% Interference
I = [I p(r)*rho/(power(z(r),2)+power(norm(mUAV-GT),2))];
end
end
sum_I = sum(I);
mUAV = UAV(m, 1:2);
S = p(m)*rho/(power(z(m),2)+power(norm(mUAV-GT),2));
N = sigma;
temp_Rg = log(1+S/(sum_I+N))/log(2);
Rg = [Rg temp_Rg];
end
disp("min: "+ min(Rg) + "<after> <-> " + min(prev_Rg)+"<before>");
fprintf('\n'); disp("objective improvement: (<" + epsilon+")");
disp("altitude: "+ (psi_z-prev_psi_z));
disp("power: "+ (psi_p-prev_psi_p));
disp("Minimum ach. rate: "+(min(Rg)-min(prev_Rg)));
result = [result min(Rg)];
if (abs(min(Rg)-min(prev_Rg)) < epsilon)
break
else
prev_Rg = Rg;
if (tot_iter == max_iter)
break
end
tot_iter = tot_iter + 1;
end
prev_psi_z = psi_z; prev_psi_p = psi_p; fprintf('\n\n')
fin = 0; % reset fin, do next iteration
disp("======================"+tot_iter+"========================")
end
end
“matlab_matrix_ideal_small.mat” contains UAV = [x_coordinate, y_coordinate, radius] and Ku_cover = [x_coordinate, y_coordinate, m_th_UAV]
UAV = [661.3286 685.2581 101.7455; 99.0194 104.2281 101.7455; 709.5000 90.0000 101.7455; 143.0000 704.0000 101.7455]
Ku_cover = [714.0000 758.0000 0; 695.0000 602.0000 0; 730.0000 633.0000 0; 606.0000 756.0000 0; 602.0000 713.0000 0; 129.0000 7.0000 1.0000; 62.0000 199.0000 1.0000; 143.0000 50.0000 1.0000; 51.0000 76.0000 1.0000; 196.0000 135.0000 1.0000; 781.0000 29.0000 2.0000; 747.0000 77.0000 2.0000; 698.0000 20.0000 2.0000; 638.0000 151.0000 2.0000; 616.0000 76.0000 2.0000; 134.0000 772.0000 3.0000; 140.0000 728.0000 3.0000; 152.0000 636.0000 3.0000; 181.0000 664.0000 3.0000; 165.0000 666.0000 3.0000; 661.3286 685.2581 0; 99.0194 104.2281 1.0000; 709.5000 90.0000 2.0000; 143.0000 704.0000 3.0000]
I am sorry for asking this long question. I am really new to CVX and optimization problems.