@Mark_L_Stone, @Michal_Adamaszek
I am trying to solve a Stochastic MPC problem for a Network Controlled System (NCS) based control
I am using SDPT3 solver. My simulation run for the optimization problem gives out the following messages :
num. of constraints = 54
dim. of socp var = 27, num. of socp blk = 1
dim. of linear var = 59
SDPT3: Infeasible path-following algorithms
version predcorr gam expon scale_data
HKM 1 0.000 1 0
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
0|0.000|0.000|1.0e+01|1.8e+00|1.3e+07|-5.500225e+06 0.000000e+00| 0:0:00| chol 1 1
1|0.948|0.740|5.3e-01|4.8e-01|3.3e+06| 2.963048e+04 -1.372817e+04| 0:0:00| chol 1 1
2|1.000|0.981|8.9e-08|9.2e-03|3.0e+05| 1.758180e+05 -2.369740e+04| 0:0:00| chol 1 1
3|0.884|0.936|7.0e-08|6.0e-04|3.8e+04| 1.549593e+04 -1.503332e+04| 0:0:00| chol 1 1
4|0.255|0.708|1.1e-07|1.8e-04|2.8e+04| 1.218268e+04 -1.153551e+04| 0:0:00| chol 1 1
5|0.680|0.815|3.4e-08|3.7e-05|1.5e+04| 2.350088e+03 -1.175631e+04| 0:0:00| chol 1 1
6|0.903|1.000|3.7e-09|3.7e-06|7.5e+03|-4.674813e+03 -1.197767e+04| 0:0:00| chol 1 1
7|1.000|1.000|4.3e-10|1.1e-06|2.7e+03|-8.352582e+03 -1.103458e+04| 0:0:00| chol 1 1
8|0.852|1.000|2.7e-10|3.3e-07|1.2e+03|-9.390996e+03 -1.055545e+04| 0:0:00| chol 1 1
9|1.000|1.000|7.7e-11|9.9e-08|3.5e+02|-9.942374e+03 -1.028593e+04| 0:0:00| chol 1 1
10|0.863|1.000|1.2e-11|3.0e-08|1.3e+02|-1.004625e+04 -1.017981e+04| 0:0:00| chol 1 1
11|1.000|0.966|1.2e-12|9.6e-09|2.4e+01|-1.010277e+04 -1.012632e+04| 0:0:00| chol 1 1
12|0.938|1.000|2.1e-12|2.7e-09|6.2e+00|-1.010845e+04 -1.011462e+04| 0:0:00| chol 1 1
13|0.988|0.942|2.5e-12|9.1e-10|4.7e-01|-1.011038e+04 -1.011083e+04| 0:0:00| chol 1 1
14|0.974|0.949|1.8e-11|4.7e-11|2.4e-02|-1.011046e+04 -1.011048e+04| 0:0:00| chol 1 1
15|0.971|0.959|2.8e-12|3.4e-12|1.0e-03|-1.011046e+04 -1.011046e+04| 0:0:00|
stop: max(relative gap, infeasibilities) < 1.00e-07
number of iterations = 15
primal objective value = -1.01104629e+04
dual objective value = -1.01104638e+04
gap := trace(XZ) = 9.96e-04
relative gap = 4.92e-08
actual relative gap = 4.63e-08
rel. primal infeas = 2.77e-12
rel. dual infeas = 3.42e-12
norm(X), norm(y), norm(Z) = 3.3e+03, 1.8e+04, 5.5e+03
norm(A), norm(b), norm© = 5.1e+01, 2.3e+03, 2.0e+04
Total CPU time (secs) = 0.06
CPU time per iteration = 0.00
termination code = 0
DIMACS errors: 4.2e-12 0.0e+00 4.8e-12 0.0e+00 4.6e-08 4.9e-08
Percentage of CPU time spent in various parts
preproc Xchol Zchol pred pred_steplen corr corr_steplen misc
4.3 4.3 4.3 42.0 5.8 5.8 11.6 2.9 2.9 15.9
The results of my simulation are not as expected. I want to know what ‘DIMACS errors’ stand for?
Also could you please let me know, based upon these messages, is there anything wrong with my simulation?
It is a convex quadratic program. Additive process noise is gaussian with zero mean and variance I3, i.e. mu = 0, variance = eye(3) and standard_deviation = sqrt(variance). Channel dropout effect is considered to b binary Bernoulli.
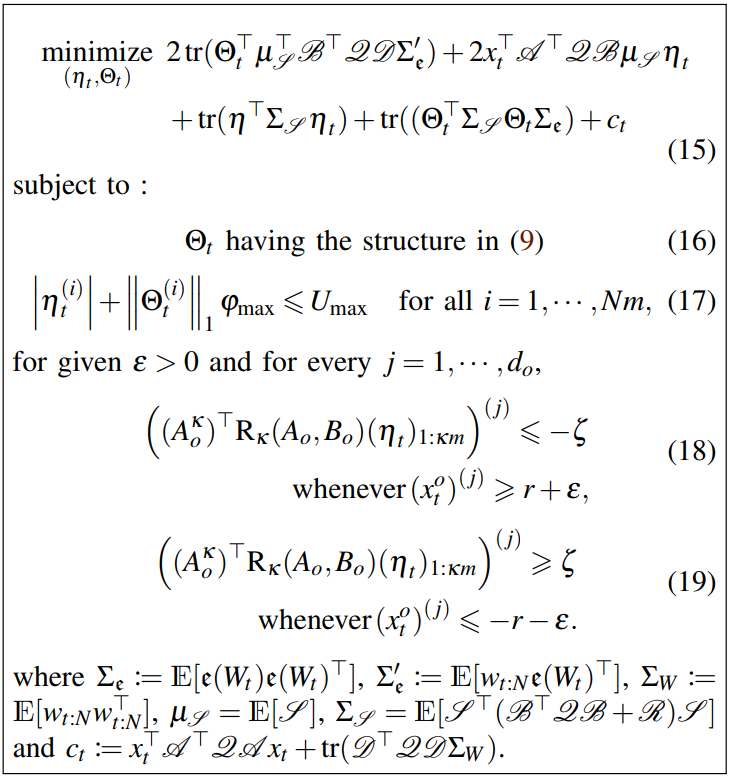
The optimization problem to be solved is as below: