But I am getting the following error:
Status: Unbounded
Optimal value (cvx_optval): -Inf
Can you help me please in detecting the error? I am attaching the code below:
Code:
cvx_clear
clc
clear all
% tolerance and maxinum number of iterations
tolX = 1e-3;
maxiter = 10;
n=4;
X=zeros(10,4)
for k=1:maxiter
cvx_begin
variable Tgt1(1);
variable Tgt2(1);
variable a(1);
variable b(1);
X(1,:)= [1.2,1.2,1.0409,0];
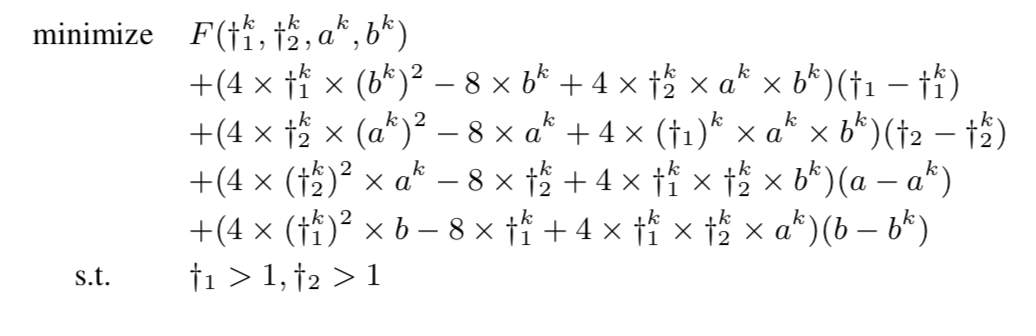
Phi= (2*X(k,1)^2*X(k,4)^2 + 4*X(k,1)*X(k,2)*X(k,3)*X(k,4) - 8*X(k,1)*X(k,4) + 2*X(k,2)^2*X(k,3)^2 - 8*X(k,2)*X(k,3) + 10)+(2*X(k,4)*(X(k,2)*X(k,3) + X(k,1)*X(k,4) - 1) + 2*X(k,4)*(X(k,2)*X(k,3) + X(k,1)*X(k,4) - 3))*(Tgt1-X(k,1))+(2*X(k,3)*(X(k,2)*X(k,3) + X(k,1)*X(k,4) - 1) + 2*X(k,3)*(X(k,2)*X(k,3) + X(k,1)*X(k,4) - 3))*(Tgt2-X(k,2))+(2*X(k,2)*(X(k,2)*X(k,3) + X(k,1)*X(k,4) - 1) + 2*X(k,2)*(X(k,2)*X(k,3) + X(k,1)*X(k,4) - 3))*(a-X(k,3))+(2*X(k,1)*(X(k,2)*X(k,3) + X(k,1)*X(k,4) - 1) + 2*X(k,1)*(X(k,2)*X(k,3) + X(k,1)*X(k,4) - 3))*(b-X(k,4))
%objective function
minimize Phi
%constraints
subject to
Tgt1 >= 1.1
Tgt2 >= 1.1
cvx_end
X(k+1,:)=[Tgt1 Tgt2 a b]
end