Dear Mark:
We are turning to you for more help. We are trying to solve another optimization problem as below
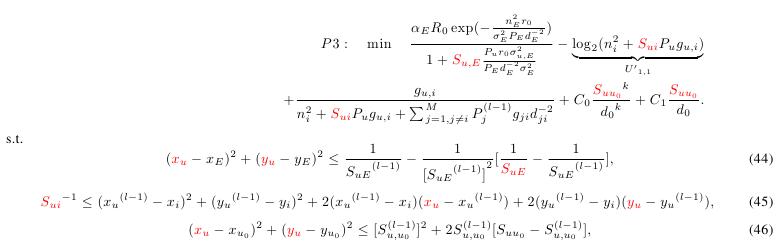
Please note that the highlighted symbols are variables. We have followed your advice: follow the advice in CVXQUAD: How to use CVXQUAD’s Pade Approximant instead of CVX’s unreliable Successive Approximation for GP mode, log, exp, entr, rel_entr, kl_div, log_det, det_rootn, exponential cone.
The following is the matlab code and resulting status:
A =[1 0 0 0 ;
HPU’ c_P];
b = [power_UAVMAX c_b ];
cvx_begin %quiet
variables S_ue S_u1 S_u2 S_u3 S_uu0 Xu Yu Z1 Z2 Z3 Z4
minimize( Enemy_Loss_Factor*R0*(FIX1*Z1 - 1)- B/log(2)*...
(-rel_entr(1,p_N0 + S_u1.*HPU_user1 + HD_user1_user1ToM*P0'))+B/(log(2))*...
(-rel_entr(1,p_N0 + S_u1_0.*HPU_user1 + HD_user1_user1ToM.*P0*Index1))+B./log(2).*...
(((S_u1-S_u1_0).*HPU_user1 )./(p_N0 + S_u1_0.*HPU_user1 +
HD_user1_user1ToM.*P0*Index1)+...% i = 1
(S_uu0./Dist0).^K+(S_uu0 ./ V0))
subject to
(Xu - X_loc_enemy).^2 + (Yu - Y_loc_enemy).^2 <= 1./S_ue_0 - 1./S_ue_0.^2.*(Z1 - 1./S_ue_0)
rel_entr(1,S_ue) + rel_entr(1,Z1) <= 0
Z2<= (Xu_0 - X_loc_user1).^2 + (Yu_0 - Y_loc_user1).^2 + 2*(Xu_0 - X_loc_user1).*(Xu - Xu_0) +2*(Yu_0 - Y_loc_user1).*(Yu - Yu_0)
rel_entr(1, S_u1 ) + rel_entr(1,Z2) <= 0
Z3<= (Xu_0 - X_loc_user1).^2 + (Yu_0 - Y_loc_user1).^2 + 2*(Xu_0 - X_loc_user1).*(Xu - Xu_0) +2*(Yu_0 - Y_loc_user1).*(Yu - Yu_0)
rel_entr(1, S_u2 ) + rel_entr(1,Z3) <= 0
Z4<= (Xu_0 - X_loc_user1).^2 + (Yu_0 - Y_loc_user1).^2 + (Xu_0 - X_loc_user1).*(Xu - Xu_0) +(Yu_0 - Y_loc_user1).*(Yu - Yu_0)
rel_entr(1, S_u3 ) + rel_entr(1,Z4) <= 0
(Xu - X_logc_U0).^2 + (Yu - Y_logc_U0).^2 <= S_uu0_0.^2 + 2*S_uu0_0*(S_uu0 -S_uu0_0)
S_u1.*HPU(1) + c_P(1,:)*(P0') <= c_b(1)
S_u2.*HPU(2) + c_P(2,:)*(P0') <= c_b(2)
S_u3.*HPU(3) + c_P(3,:)*(P0') <= c_b(3)
rel_entr(1,1+HPU_enemy.*S_ue./gain_enemy) + rel_entr(1,Z1) <= 0
cvx_end
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
Calling SDPT3 4.0: 279 variables, 107 equality constraints
** For improved efficiency, SDPT3 is solving the dual problem.**
------------------------------------------------------------
** num. of constraints = 107**
** dim. of sdp var = 166, num. of sdp blk = 83**
** dim. of linear var = 30**
** number of nearly dependent constraints = 106**
** To remove these constraints, re-run sqlp.m with OPTIONS.rmdepconstr = 1.**
** SDPT3: Infeasible path-following algorithms**
** version predcorr gam expon scale_data**
** HKM 1 0.000 1 0 **
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
-------------------------------------------------------------------
** 0|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 0.000000e+00| 0:0:00| chol 2 * 3 **
** 1|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 -2.340504e+13| 0:0:00| chol 2 * 3 **
** 2|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 -1.808893e+14| 0:0:00| chol 2 * 3 **
** 3|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 -3.946221e+14| 0:0:00| chol 2 * 3 **
** 4|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 -1.993101e+15| 0:0:00|**
** *** Too many tiny steps: restarting with the following iterate.**
** *** [X,y,Z] = infeaspt(blk,At,C,b,2,1e5); chol * 3 * 3 **
** 5|0.000|0.000|4.0e+07|1.0e+00|3.0e+12| 2.326203e+26 -2.085650e+18| 0:0:00|**
** *** Too many tiny steps even after restarting**
** stop: steps too short consecutively***
-------------------------------------------------------------------
** number of iterations = 5**
** primal objective value = 2.32620313e+26**
** dual objective value = 0.00000000e+00**
** gap := trace(XZ) = 1.96e+12**
** relative gap = 8.43e-15**
** actual relative gap = 1.00e+00**
** rel. primal infeas (scaled problem) = 4.00e+07**
** rel. dual " " " = 1.00e+00**
** rel. primal infeas (unscaled problem) = 0.00e+00**
** rel. dual " " " = 0.00e+00**
** norm(X), norm(y), norm(Z) = 1.4e+06, 0.0e+00, 1.4e+06**
** norm(A), norm(b), norm© = 1.8e+14, 4.4e+11, 2.3e+21**
** Total CPU time (secs) = 0.30 **
** CPU time per iteration = 0.06 **
** termination code = -5**
** DIMACS: 6.4e+07 0.0e+00 1.0e+00 0.0e+00 1.0e+00 8.4e-15**
-------------------------------------------------------------------
------------------------------------------------------------
Status: Failed
Optimal value (cvx_optval): NaN
Thanks a lot for your time!