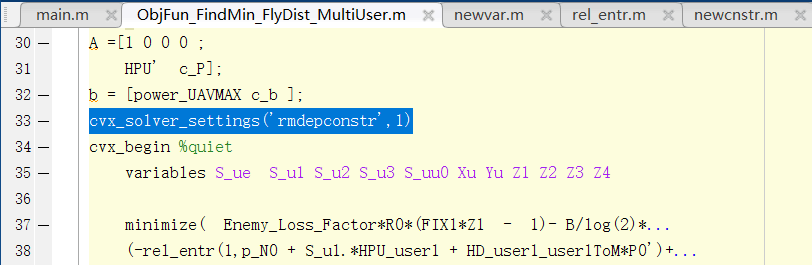
Thanks for the suggestion. I have just added
cvx_solver_settings(‘rmdepconstr’,1)
into the Matlab code, as can be seen from below figure:
However, it does not work(the resulting status is given below).
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
> =====================================
> Using Pade approximation for exponential
> cone with parameters m=3, k=3
> =====================================
**> **
> Calling SDPT3 4.0: 279 variables, 107 equality constraints
> For improved efficiency, SDPT3 is solving the dual problem.
> ------------------------------------------------------------
> NOTE: custom settings have been set for this solver.
> ------------------------------------------------------------
**> **
> num. of constraints = 107
> dim. of sdp var = 166, num. of sdp blk = 83
> dim. of linear var = 30
> number of nearly dependent constraints = 106
> checkdepconstr: removing dependent constraints…
> checkdepconstr: basis rows cannot be reliably identified, abort removing nearly dependent constraints
**> *********************************************************************
> SDPT3: Infeasible path-following algorithms
**> *********************************************************************
> version predcorr gam expon scale_data
**> HKM 1 0.000 1 0 **
> it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
> -------------------------------------------------------------------
**> 0|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 0.000000e+00| 0:0:00| chol 2 * 3 **
**> 1|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 -2.340504e+13| 0:0:00| chol 2 * 3 **
**> 2|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 -1.808893e+14| 0:0:00| chol 2 * 3 **
**> 3|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 -3.946221e+14| 0:0:00| chol 2 * 3 **
> 4|0.000|0.000|2.2e+14|1.0e+00|2.6e+33| 1.281612e+33 -1.993101e+15| 0:0:00|
> *** Too many tiny steps: restarting with the following iterate.
*> *** [X,y,Z] = infeaspt(blk,At,C,b,2,1e5); chol * 3 * 3 **
> 5|0.000|0.000|4.0e+07|1.0e+00|3.0e+12| 2.326203e+26 -2.085650e+18| 0:0:00|
> *** Too many tiny steps even after restarting
> stop: steps too short consecutively
> -------------------------------------------------------------------
> number of iterations = 5
> primal objective value = 2.32620313e+26
> dual objective value = 0.00000000e+00
> gap := trace(XZ) = 1.96e+12
> relative gap = 8.43e-15
> actual relative gap = 1.00e+00
> rel. primal infeas (scaled problem) = 4.00e+07
> rel. dual " " " = 1.00e+00
> rel. primal infeas (unscaled problem) = 0.00e+00
> rel. dual " " " = 0.00e+00
> norm(X), norm(y), norm(Z) = 1.4e+06, 0.0e+00, 1.4e+06
> norm(A), norm(b), norm© = 1.8e+14, 4.4e+11, 2.3e+21
**> Total CPU time (secs) = 0.31 **
**> CPU time per iteration = 0.06 **
> termination code = -5
> DIMACS: 6.4e+07 0.0e+00 1.0e+00 0.0e+00 1.0e+00 8.4e-15
> -------------------------------------------------------------------
**> **
> ------------------------------------------------------------
> Status: Failed
> Optimal value (cvx_optval): NaN
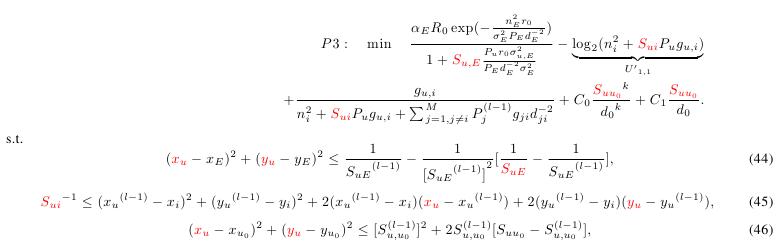
**Then I delete the first two constraints which are corresponding to inequation (44), i.e., **
(Xu - X_loc_enemy).^2 + (Yu - Y_loc_enemy).^2 <= 1./S_ue_0 - 1./S_ue_0.^2.*(Z1 - 1./S_ue_0)
rel_entr(1,S_ue) + rel_entr(1,Z1) <= 0
The problem can not be solved in the first round, however, in the second and sequetial rounds, it can be solved succesfully, as can be seen below:
** =====================================**
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
Calling SDPT3 4.0: 233 variables, 91 equality constraints
** For improved efficiency, SDPT3 is solving the dual problem.**
------------------------------------------------------------
NOTE: custom settings have been set for this solver.
------------------------------------------------------------
** num. of constraints = 91**
** dim. of sdp var = 138, num. of sdp blk = 69**
** dim. of linear var = 26**
** SDPT3: Infeasible path-following algorithms**
** version predcorr gam expon scale_data**
** HKM 1 0.000 1 0 **
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
-------------------------------------------------------------------
** 0|0.000|0.000|3.5e+04|2.2e+00|4.1e+19|-2.023465e+19 0.000000e+00| 0:0:00| chol 2 2 **
** 1|0.000|0.000|3.5e+04|2.2e+00|4.1e+19|-2.023313e+19 -2.332384e+13| 0:0:00| chol 2 2 **
** 2|0.000|0.000|3.5e+04|2.2e+00|4.1e+19|-2.023092e+19 -2.171174e+14| 0:0:00| chol 2 2 **
** 3|0.000|0.000|3.5e+04|2.2e+00|4.1e+19|-2.022030e+19 -4.194465e+14| 0:0:00| chol 2 2 **
** 4|0.001|0.003|3.5e+04|2.2e+00|4.1e+19|-2.020112e+19 -3.228699e+15| 0:0:00|**
** *** Too many tiny steps: restarting with the following iterate.**
** *** [X,y,Z] = infeaspt(blk,At,C,b,2,1e5); chol 1 2 **
** 5|0.000|0.000|1.0e+00|1.0e+00|2.6e+12|-3.674090e+12 -2.085650e+18| 0:0:00|**
** *** Too many tiny steps even after restarting**
** stop: steps too short consecutively***
-------------------------------------------------------------------
** number of iterations = 5**
** primal objective value = -3.67408969e+12**
** dual objective value = -2.08565042e+18**
** gap := trace(XZ) = 2.65e+12**
** relative gap = 1.27e-06**
** actual relative gap = 1.00e+00**
** rel. primal infeas (scaled problem) = 1.00e+00**
** rel. dual " " " = 1.01e+00**
** rel. primal infeas (unscaled problem) = 0.00e+00**
** rel. dual " " " = 0.00e+00**
** norm(X), norm(y), norm(Z) = 1.3e+06, 4.8e+06, 5.3e+06**
** norm(A), norm(b), norm© = 1.6e+04, 4.4e+11, 2.1e+07**
** Total CPU time (secs) = 0.30 **
** CPU time per iteration = 0.06 **
** termination code = -5**
** DIMACS: 1.6e+00 0.0e+00 1.7e+00 0.0e+00 1.0e+00 1.3e-06**
-------------------------------------------------------------------
------------------------------------------------------------
Status: Failed
Optimal value (cvx_optval): NaN
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
Calling SDPT3 4.0: 233 variables, 91 equality constraints
** For improved efficiency, SDPT3 is solving the dual problem.**
------------------------------------------------------------
NOTE: custom settings have been set for this solver.
------------------------------------------------------------
** num. of constraints = 91**
** dim. of sdp var = 138, num. of sdp blk = 69**
** dim. of linear var = 26**
** SDPT3: Infeasible path-following algorithms**
** version predcorr gam expon scale_data**
** HKM 1 0.000 1 0 **
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
-------------------------------------------------------------------
** 0|0.000|0.000|7.5e+03|1.0e+00|3.6e+18| 1.688756e+18 0.000000e+00| 0:0:00| chol 2 2 **
** 1|0.001|0.001|7.5e+03|1.0e+00|3.6e+18| 1.686681e+18 -2.369304e+13| 0:0:00| chol 2 2 **
** 2|0.002|0.005|7.5e+03|9.9e-01|3.6e+18| 1.683740e+18 -2.196155e+14| 0:0:00| chol 2 2 **
** 3|0.010|0.006|7.4e+03|9.9e-01|3.6e+18| 1.668505e+18 -4.267657e+14| 0:0:00| chol 2 2 **
** 4|0.019|0.062|7.3e+03|9.3e-01|3.5e+18| 1.638604e+18 -3.007115e+15| 0:0:00| chol 2 2 **
** 5|0.187|0.054|5.9e+03|8.8e-01|3.3e+18| 1.348677e+18 -4.276196e+15| 0:0:00| chol 2 2 **
** 6|0.166|0.338|5.0e+03|5.8e-01|2.7e+18| 1.139477e+18 -1.847051e+16| 0:0:00| chol 2 2 **
** 7|0.754|0.719|1.2e+03|1.6e-01|8.5e+17| 3.291484e+17 -1.593915e+16| 0:0:00| chol 2 2 **
** 8|0.792|0.651|2.5e+02|5.7e-02|3.4e+17| 1.224091e+17 -1.052687e+16| 0:0:00| chol 2 2 **
** 9|0.811|0.857|4.8e+01|8.2e-03|6.9e+16| 3.716348e+16 -1.714011e+15| 0:0:00| chol 2 2 **
**10|0.788|0.473|1.0e+01|4.3e-03|3.9e+16| 1.930476e+16 -1.131258e+15| 0:0:00| chol 2 2 **
**11|0.632|0.823|3.8e+00|7.6e-04|1.7e+16| 1.189954e+16 -1.892313e+14| 0:0:00| chol 2 2 **
**12|0.815|0.609|7.0e-01|3.0e-04|6.1e+15| 4.242271e+15 -1.091545e+14| 0:0:00| chol 2 2 **
**13|0.736|0.819|1.8e-01|5.4e-05|2.4e+15| 1.936973e+15 -4.299005e+13| 0:0:00| chol 2 2 **
**14|0.606|0.543|7.3e-02|2.5e-05|1.4e+15| 1.069730e+15 -3.757119e+13| 0:0:00| chol 2 2 **
**15|0.669|0.779|2.4e-02|5.5e-06|8.1e+14| 6.085669e+14 -2.762333e+13| 0:0:00| chol 2 2 **
**16|0.587|0.621|9.9e-03|2.1e-06|5.1e+14| 3.558779e+14 -2.145224e+13| 0:0:00| chol 2 2 **
**17|0.558|0.751|4.4e-03|5.5e-07|3.3e+14| 2.375757e+14 -1.617851e+13| 0:0:00| chol 2 2 **
**18|0.904|0.879|4.2e-04|7.6e-08|6.4e+13| 4.553967e+13 -4.817909e+12| 0:0:00| chol 2 2 **
**19|0.558|0.796|1.8e-04|2.4e-08|4.2e+13| 3.070416e+13 -2.890987e+12| 0:0:00| chol 2 2 **
**20|0.921|0.877|1.5e-05|5.1e-09|9.5e+12| 6.764841e+12 -9.069696e+11| 0:0:00| chol 2 2 **
**21|0.852|0.828|2.2e-06|1.7e-09|4.0e+12| 2.863848e+12 -4.058692e+11| 0:0:00| chol 2 2 **
**22|0.760|0.892|5.2e-07|4.6e-10|1.4e+12| 1.049945e+12 -1.180939e+11| 0:0:00| chol 2 2 **
**23|0.692|0.731|1.6e-07|2.4e-10|7.8e+11| 5.453558e+11 -8.044132e+10| 0:0:00| chol 2 2 **
**24|0.811|0.891|3.0e-08|6.0e-11|2.5e+11| 1.662367e+11 -3.847266e+10| 0:0:00| chol 2 2 **
**25|0.795|0.792|6.2e-09|2.6e-11|1.1e+11| 6.086836e+10 -2.997054e+10| 0:0:00| chol 2 2 **
**26|0.783|0.890|1.4e-09|7.5e-12|3.9e+10| 9.819369e+09 -2.353004e+10| 0:0:00| chol 2 2 **
**27|0.724|0.780|3.7e-10|4.4e-12|2.2e+10|-3.892263e+09 -2.248423e+10| 0:0:00| chol 2 2 **
28|0.827|0.970|6.5e-11|1.2e-12|6.6e+09|-1.534949e+10 -2.119441e+10| 0:0:00| chol 2 2 **
29|0.885|1.000|7.4e-12|5.0e-13|1.6e+09|-1.947948e+10 -2.092088e+10| 0:0:00| chol 2 2 **
30|0.804|1.000|1.5e-12|3.6e-13|5.0e+08|-2.038982e+10 -2.084066e+10| 0:0:00| chol 2 2 **
31|0.824|1.000|2.6e-13|3.2e-13|1.6e+08|-2.067427e+10 -2.081698e+10| 0:0:00| chol 2 2 **
32|0.788|1.000|5.4e-14|2.9e-13|5.3e+07|-2.075788e+10 -2.080617e+10| 0:0:00| chol 2 2 **
33|0.811|1.000|1.0e-14|3.1e-13|2.0e+07|-2.078570e+10 -2.080349e+10| 0:0:00| chol 2 1 **
34|0.824|1.000|1.8e-15|2.5e-13|5.7e+06|-2.079657e+10 -2.080169e+10| 0:0:00| chol 1 1 **
35|0.780|1.000|8.3e-16|2.5e-13|2.5e+06|-2.079912e+10 -2.080141e+10| 0:0:00| chol 2 2 **
36|0.828|0.999|6.2e-16|1.4e-13|7.2e+05|-2.080046e+10 -2.080111e+10| 0:0:00| chol 2 2 **
37|0.712|1.000|5.1e-16|1.2e-13|4.6e+05|-2.080067e+10 -2.080108e+10| 0:0:00| chol 2 2 **
38|0.749|1.000|3.7e-16|6.2e-14|2.1e+05|-2.080083e+10 -2.080102e+10| 0:0:00| chol 2 1 **
39|0.822|1.000|1.9e-16|2.9e-14|9.5e+04|-2.080091e+10 -2.080100e+10| 0:0:00| chol 2 2 **
40|0.874|0.973|4.6e-16|6.7e-15|1.9e+04|-2.080096e+10 -2.080098e+10| 0:0:00|# chol 2 2 **
41|0.951|0.988|7.0e-16|1.9e-15|3.7e+03|-2.080097e+10 -2.080097e+10| 0:0:00|# chol 2 2 **
42|1.000|1.000|4.6e-16|3.8e-16|1.2e+03|-2.080097e+10 -2.080097e+10| 0:0:00|# chol 2 2 **
43|0.921|0.987|1.1e-15|8.6e-16|2.3e+02|-2.080097e+10 -2.080097e+10| 0:0:00|
** stop: max(relative gap, infeasibilities) < 1.49e-08
-------------------------------------------------------------------
** number of iterations = 43
** primal objective value = -2.08009702e+10
** dual objective value = -2.08009704e+10
** gap := trace(XZ) = 2.30e+02
** relative gap = 5.54e-09
** actual relative gap = 4.90e-09
** rel. primal infeas (scaled problem) = 1.09e-15
** rel. dual " " " = 8.61e-16
** rel. primal infeas (unscaled problem) = 0.00e+00
** rel. dual " " " = 0.00e+00
** norm(X), norm(y), norm(Z) = 1.1e+12, 8.3e+12, 8.3e+12
** norm(A), norm(b), norm© = 3.5e+03, 4.4e+11, 1.7e+06
** Total CPU time (secs) = 0.24 **
** CPU time per iteration = 0.01 **
** termination code = 0
** DIMACS: 1.7e-15 0.0e+00 1.5e-15 0.0e+00 4.9e-09 5.5e-09
-------------------------------------------------------------------
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): -1.23798e+18
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
=====================================
Using Pade approximation for exponential
cone with parameters m=3, k=3
=====================================
Calling SDPT3 4.0: 233 variables, 91 equality constraints
** For improved efficiency, SDPT3 is solving the dual problem.**
------------------------------------------------------------
NOTE: custom settings have been set for this solver.
------------------------------------------------------------
** num. of constraints = 91**
** dim. of sdp var = 138, num. of sdp blk = 69**
** dim. of linear var = 26**
** SDPT3: Infeasible path-following algorithms**
** version predcorr gam expon scale_data**
** HKM 1 0.000 1 0 **
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
-------------------------------------------------------------------
** 0|0.000|0.000|2.3e+04|2.2e+00|1.7e+15|-8.292009e+14 0.000000e+00| 0:0:00| chol 1 2 **
** 1|0.000|0.000|2.3e+04|2.2e+00|1.7e+15|-8.291349e+14 -3.290357e+09| 0:0:00| chol 1 2 **
** 2|0.000|0.000|2.3e+04|2.2e+00|1.7e+15|-8.290394e+14 -1.882718e+10| 0:0:00| chol 1 2 **
** 3|0.001|0.000|2.3e+04|2.2e+00|1.7e+15|-8.285748e+14 -3.565843e+10| 0:0:00| chol 2 2 **
** 4|0.001|0.003|2.3e+04|2.2e+00|1.7e+15|-8.277512e+14 -2.193466e+11| 0:0:00|**
** *** Too many tiny steps: restarting with the following iterate.**
** *** [X,y,Z] = infeaspt(blk,At,C,b,2,1e5); chol 1 1 **
** 5|0.621|0.578|3.8e+01|4.3e-01|2.6e+17|-1.359567e+12 -4.156501e+17| 0:0:00| chol 1 2 **
** 6|0.000|0.000|3.8e+01|4.3e-01|2.6e+17|-1.356623e+12 -4.156194e+17| 0:0:00| chol 1 2 **
** 7|0.000|0.000|3.8e+01|4.3e-01|2.6e+17|-1.349707e+12 -4.155994e+17| 0:0:00| chol 1 2 **
** 8|0.001|0.000|3.8e+01|4.3e-01|2.6e+17|-1.270517e+12 -4.155541e+17| 0:0:00| chol 1 2 **
** 9|0.002|0.004|3.8e+01|4.2e-01|2.6e+17|-1.189136e+12 -4.146214e+17| 0:0:00| chol 1 2 **
**10|0.009|0.002|3.7e+01|4.2e-01|2.6e+17| 2.868385e+11 -4.141717e+17| 0:0:00| chol 1 1 **
**11|0.012|0.020|3.7e+01|4.2e-01|2.6e+17| 1.388974e+12 -4.089875e+17| 0:0:00| chol 1 2 **
**12|0.010|0.009|3.7e+01|4.1e-01|2.6e+17| 1.916318e+13 -4.068034e+17| 0:0:00| chol 1 1 **
**13|0.285|0.090|2.6e+01|3.7e-01|2.9e+17| 9.328410e+13 -3.825058e+17| 0:0:00| chol 1 2 **
**14|0.478|0.674|1.4e+01|1.2e-01|1.4e+17| 1.604177e+14 -1.580122e+17| 0:0:00| chol 1 1 **
**15|0.688|0.226|4.3e+00|9.4e-02|1.5e+17| 7.920949e+14 -1.241986e+17| 0:0:00| chol 2 2 **
**16|0.660|0.451|1.5e+00|5.2e-02|9.3e+16| 9.909623e+14 -6.972369e+16| 0:0:00| chol 2 2 **
**17|0.785|0.905|3.1e-01|4.9e-03|9.6e+15| 4.785442e+14 -6.827212e+15| 0:0:00| chol 2 2 **
**18|0.532|0.431|1.5e-01|2.8e-03|7.1e+15| 3.319514e+14 -4.090253e+15| 0:0:00| chol 2 2 **
**19|0.920|0.906|1.2e-02|2.6e-04|7.4e+14| 5.851464e+13 -4.111651e+14| 0:0:00| chol 2 2 **
**20|0.910|0.610|1.0e-03|1.0e-04|4.1e+14| 3.671482e+13 -1.757251e+14| 0:0:00| chol 2 2 **
**21|0.540|0.802|4.8e-04|2.0e-05|1.3e+14| 2.882051e+13 -4.126427e+13| 0:0:00| chol 2 2 **
**22|0.814|0.790|9.0e-05|4.3e-06|4.6e+13| 1.782912e+13 -1.129282e+13| 0:0:00| chol 2 2 **
**23|0.889|0.903|9.9e-06|4.3e-07|8.5e+12| 5.294769e+12 -1.351390e+12| 0:0:00| chol 2 2 **
**24|0.821|0.581|1.8e-06|1.9e-07|4.3e+12| 2.478233e+12 -7.262154e+11| 0:0:00| chol 2 2 **
**25|0.752|0.900|4.4e-07|2.3e-08|1.4e+12| 1.062699e+12 -1.461507e+11| 0:0:00| chol 1 2 **
**26|0.823|0.824|7.8e-08|6.1e-09|4.6e+11| 3.298022e+11 -5.189739e+10| 0:0:00| chol 1 1 **
**27|0.805|0.886|1.5e-08|1.4e-09|1.4e+11| 1.016861e+11 -1.735180e+10| 0:0:00| chol 2 1 **
**28|0.742|0.798|3.9e-09|6.0e-10|7.0e+10| 4.613019e+10 -1.151663e+10| 0:0:00| chol 1 1 **
**29|0.851|0.902|5.9e-10|1.3e-10|1.7e+10| 7.689480e+09 -6.724827e+09| 0:0:00| chol 1 1 **
**30|0.752|0.757|1.5e-10|6.3e-11|9.3e+09| 1.421840e+09 -6.164050e+09| 0:0:00| chol 1 2 **
**31|0.821|0.906|2.6e-11|1.4e-11|2.7e+09|-3.215742e+09 -5.501752e+09| 0:0:00| chol 2 1 **
**32|0.762|0.759|8.1e-12|6.8e-12|1.4e+09|-4.305865e+09 -5.403108e+09| 0:0:00| chol 2 2 **
**33|0.816|0.896|5.0e-12|1.6e-12|4.1e+08|-4.964496e+09 -5.306673e+09| 0:0:00| chol 2 1 **
34|0.756|0.776|9.1e-12|7.9e-13|2.1e+08|-5.118291e+09 -5.290862e+09| 0:0:00| chol 2 2 **
35|0.821|0.920|6.8e-12|2.0e-13|6.3e+07|-5.220671e+09 -5.275235e+09| 0:0:00| chol 2 2 **
36|0.830|0.947|2.2e-12|7.3e-14|2.1e+07|-5.252419e+09 -5.271477e+09| 0:0:00| chol 1 2 **
37|0.857|1.000|5.0e-12|2.1e-14|4.8e+06|-5.264923e+09 -5.269312e+09| 0:0:00| chol 2 2 **
38|0.820|0.977|2.5e-12|9.1e-15|1.4e+06|-5.267591e+09 -5.268876e+09| 0:0:00| chol 2 2 **
39|0.677|0.916|2.2e-12|6.2e-15|8.1e+05|-5.268040e+09 -5.268764e+09| 0:0:00| chol 1 1 **
40|0.727|0.971|2.5e-12|3.8e-15|4.8e+05|-5.268284e+09 -5.268718e+09| 0:0:00| chol 1 1 **
41|0.732|0.987|2.3e-12|1.7e-15|2.6e+05|-5.268447e+09 -5.268682e+09| 0:0:00| chol 1 1 **
42|0.876|0.985|1.5e-12|5.5e-16|8.0e+04|-5.268581e+09 -5.268653e+09| 0:0:00| chol 2 1 **
43|0.639|1.000|2.3e-12|8.1e-15|5.0e+04|-5.268602e+09 -5.268648e+09| 0:0:00| chol 1 1 **
44|0.873|0.987|4.0e-12|1.3e-16|1.5e+04|-5.268629e+09 -5.268642e+09| 0:0:00| chol 2 1 **
45|0.738|0.995|5.4e-13|9.9e-17|6.5e+03|-5.268634e+09 -5.268640e+09| 0:0:00| chol 2 2 **
46|0.841|0.989|1.2e-12|1.8e-16|2.1e+03|-5.268637e+09 -5.268639e+09| 0:0:00| chol 2 2 **
47|0.678|1.000|4.3e-14|2.0e-16|1.2e+03|-5.268638e+09 -5.268639e+09| 0:0:00|# chol 2 1 **
48|1.000|0.979|2.3e-12|1.2e-18|1.6e+02|-5.268639e+09 -5.268639e+09| 0:0:00| chol 1 1 **
49|0.903|0.978|1.6e-12|1.3e-16|4.7e+01|-5.268639e+09 -5.268639e+09| 0:0:00|
** stop: max(relative gap, infeasibilities) < 1.49e-08
-------------------------------------------------------------------
** number of iterations = 49
** primal objective value = -5.26863859e+09
** dual objective value = -5.26863863e+09
** gap := trace(XZ) = 4.71e+01
** relative gap = 4.47e-09
** actual relative gap = 4.02e-09
** rel. primal infeas (scaled problem) = 1.60e-12
** rel. dual " " " = 1.27e-16
** rel. primal infeas (unscaled problem) = 0.00e+00
** rel. dual " " " = 0.00e+00
** norm(X), norm(y), norm(Z) = 4.6e+12, 1.7e+19, 1.7e+19
** norm(A), norm(b), norm© = 1.6e+04, 2.8e+07, 2.1e+07
** Total CPU time (secs) = 0.23 **
** CPU time per iteration = 0.00 **
** termination code = 0
** DIMACS: 3.8e-12 0.0e+00 2.2e-16 0.0e+00 4.0e-09 4.5e-09
-------------------------------------------------------------------
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +5.15589e+09
K>>
Thank for your time and help!