Hello,
I am trying to solve the following convex SOCP problem with CVX. My problem is that CVX-status shows “Solved” state but when I check the constraints, they are not satisfied. I was wondering if you can help me to find my mistake here?
%-----load required matrices and vectors----------------------------------
load h
load D1
load D2
load QI
%—values--------------------------------------------
gamma = .1;
R = 6;
Lw = 5;
P1 = 41.14;
P2 = 19.79;
D = P1D1+P2D2+eye(RLw);
h_tild = [0;h];
D_tildq = ([0,zeros(1,RLw);zeros(RLw,1), D])^(.5);
Q1_tildq = ([1,zeros(1,RLw);zeros(RLw,1), P2QI+D1])^(.5);
Q2_tildq = ([1,zeros(1,RLw);zeros(RLw,1), P1*QI+D2])^(.5);
a1 = sqrt(gamma/P2);
a2=sqrt(gamma/P1);
%—optimization----------------------------------------------------
cvx_begin quiet
cvx_precision best
cvx_solver Mosek
variable w(RLw+1) complex
minimize( norm(D_tildqw) )
subject to
w(1)==1;
imag(w(2:end)'*h)==0; %(w'*h_tild)
real(w'*h_tild) >= a1*norm(Q1_tildq*w);
real(w'*h_tild) >= a2*norm(Q2_tildq*w);
cvx_end
cvx_status
%—check the constraints---------------------------
const1=real( (w’h_tild) - a1(norm(Q1_tildqw)) )
const2=real( (w’h_tild) - a2(norm(Q1_tildqw)) )
Here is the link to the matrices that I am using for this run and also the m-file for this example:
https://drive.google.com/open?id=1Hhg1jeLlP4R9N2FJJ9CcTUIPtXqgopSA
Here is the problem formulation:
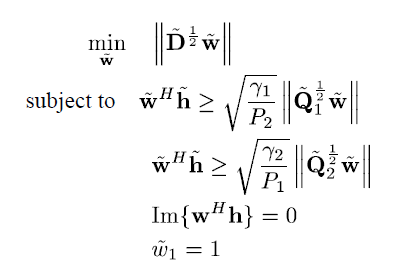
Any help would be appreciated!