I want to include a 3x3 metzler matrix (non-negative off-diagonal elements) with the elements W(1,3), W(2,1), W(3,1) and W(3,2) to be zero.
The theorem is provided in the figure:
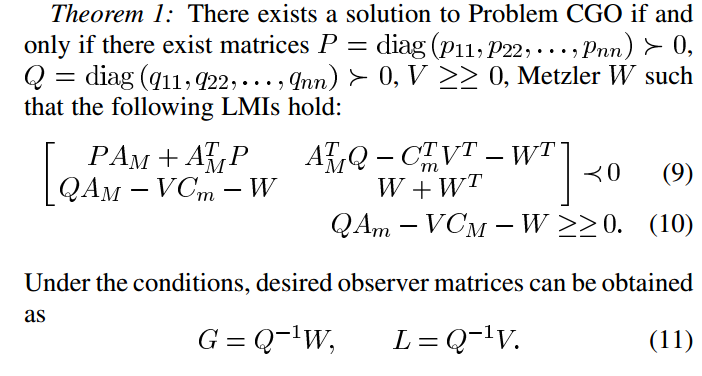
I want to implement Theorem 1 here. The solution is feasible but constraint (10) in Theorem 1 as provided in the image is violated.
The structure of the W matrix should be Metzler matrix with the additional constraint that the off-diagonal elements of W should be the zero as that of the off-diagonal elements of the matrix A22 (system matrix) which are exactly zero.
The Matlab code is provided below:
%%%%%%%%%%% MATLAB CVX CODE %%%%%%%%%%%%%%%%%
% Design of positive observer x_hat_dot = G x_hat + L y, where G=Metzler;L>>0
%for system dynamics x_dot = A x, y = Cx
clear all
clc
% Parameters
p20=0.0155;p30=1.288e-5;p40=0.0365;p50=0.0105;GP0=1.792;
% Maximum parametric perturbations
p2=p20+0.3p20;p3=p30+0.3p30;p4=p40+0.3p40;p5=p50+0.3p50;
% Minimum parametric perturbations
p22=p20-0.3p20;p33=p30-0.3p30;p44=p40-0.3p40;p55=p50-0.3p50;
% Enter system and output matrices
A220=[-p20 p30 0;0 -p40 p40;0 0 -p50]; % System matrix nominal
A22=[-p2 p3 0;0 -p4 p4;0 0 -p5]; % System matrix max
A22m=[-p22 p33 0;0 -p44 p44;0 0 -p55]; % Syatem matrix min
C=[1 0 0]; % Output matric
% LMI for observer design
cvx_begin sdp
variable P(3,3) diagonal
variable Q(3,3) diagonal
variable V(3)
variable W(3,3)
% LMI constraints
Ass=[QA22m-VC-W];
Ass>=0;
P>=0;
Q>=0;
1e-8 <= V([1 2 3]) <= 1e-6;
1e-8 <= W([2 3 6]) <= 1e-5;
[P*A22+A22’*P A22’Q-C’V’-W’;QA22-VC-W W+W’] <= 0;
cvx_end
P
Q
W
V
G = inv(Q)*W
L = inv(Q)*V