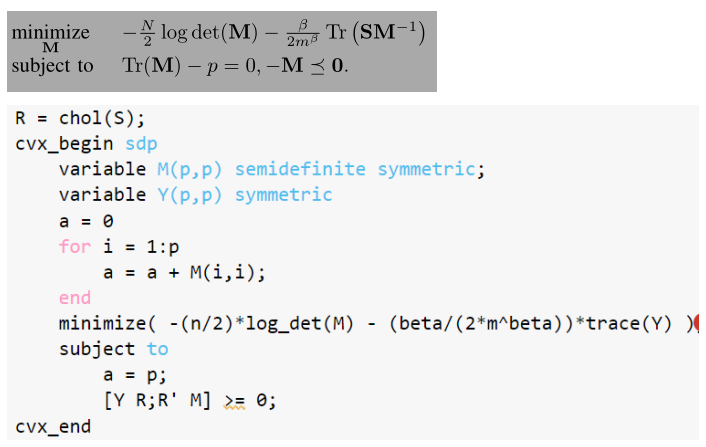
My problem is above. M is a variable matrix whose size is p by p, S is a known p by p matrix. p, N, m and beta are known scalars. Now, I need to write the constraint that Tr(M) = p, so how to implement this?
Try trace(M)==p.
Thanks you very much. But do you think there are some other problems in my code?
Because it still cannot get the optimal value
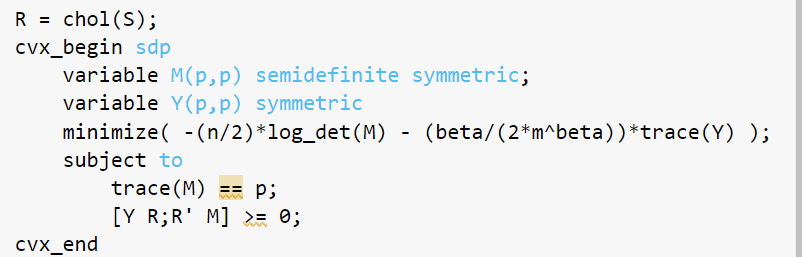
It looks like you are using the same approach as in my answer at How to compute inverse of matrix , which references my answer at Generalizing "trace_inv" for matrix quadratic forms . I didn’t check carefully that you have implemented that correctly (all transposes in correct place), but nothing jumped out at me as wrong.
Note that declaration of symmetric in addition to semidefinite for M is redundant (not necessary), but I don’t think it causes any harm.