Hello,
Example:
cvx_begin
variable Sigma2(n,n) symmetric
maximize ( w'*Sigma2*w )
subject to
Sigma2 == semidefinite(n); % Sigma2 is positive semidefinite
Sigma2(1,1) == 1
Sigma2(1,2) >= 0
Sigma2(1,3) >= 0
Sigma2(2,1) >= 0
Sigma2(2,2) == 1
Sigma2(2,3) <= 0
Sigma2(2,4) <= 0
Sigma2(3,1) >= 0
Sigma2(3,2) <= 0
Sigma2(3,3) == 1
Sigma2(3,4) >= 0
Sigma2(4,2) <= 0
Sigma2(4,3) >= 0
Sigma2(4,4) == 1
cvx_end
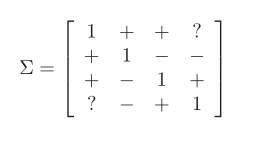
Can express these constraints with two matrices L and U instead of by elements? These are the constraints:
I tried:
U =
1 Inf Inf Inf
Inf 1 0 0
Inf 0 1 Inf
Inf 0 Inf 1
>> L
L =
1 0 0 -Inf
0 1 -Inf -Inf
0 -Inf 1 0
-Inf -Inf 0 1
But this constraint is not convex.
Error using cvxprob/newcnstr (line 192)
Disciplined convex programming error:
Invalid constraint: {real affine} >= {invalid}Error in >= (line 21)
b = newcnstr( evalin( ‘caller’, ‘cvx_problem’, ‘’ ), x, y, ‘>=’ );Error in cvx_proba2 (line 6)
Sigma2 >= L;
cvx_begin
variable Sigma2(n,n) symmetric
maximize ( w'*Sigma2*w )
subject to
Sigma2 == semidefinite(n); % Sigma2 is positive semidefinite
Sigma2 >= L
Sigma2 <= U
cvx_end
Thank you.