I have the following constraints in an optimization problem if you can please help me on how to write them with disciplined convex programming rule to use in CVX
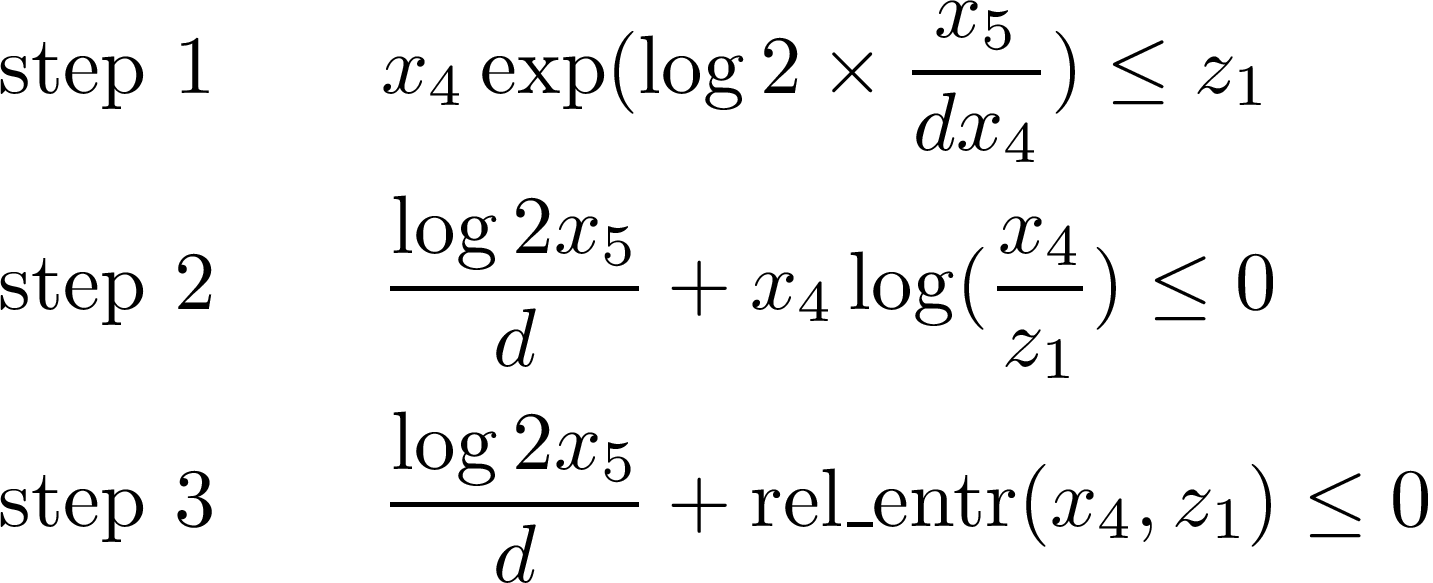
x(4)*2^(x(5)/d/x(4)) <= z x(4)*exp(x(5)/d/x(4)*log(2)) <= z
So constraint B can be handled with
variable z
z - x(4) + x(5) <= 0
{x(5)*log(2)/d,x(4),z} == exponential(1)
The exponnetial91) constraint implements the exponential cone constraint. It is listed in section 9.4 of the CVX Users’ Guide http://cvxr.com/cvx/doc/funcref.html#sets as exp_cone , but it is actually exponential(1) .
I will defer to a more clever person for constraint A, which I believe is convex when a,b,c,x(1),x(2) >= 0.
By change of variables constraint A is equivalent to
t\geq x \log(1+e^{y/x}).
This we recognize as the perspective function of the softplus function \log(1+e^x) [1]. We know that the perspective can be modeled with the same types of cones as the original function [2]. Putting the formulation of softplus from [1] together with the recipe of [2] (actually, this is exactly example 7.1 in [2]) we reformulate the above constraint as