In the picture, pk, delta and omega are variables.Left-hand side of inequality, delta[n] and omega[n] are constant,that’s the value of the nth iteration. Right hand side of inequality, wkH and hk are known.
These are the two versions of the code that I wrote,In the code,y(a_off(ii)) represents the right-hand side of the above inequality
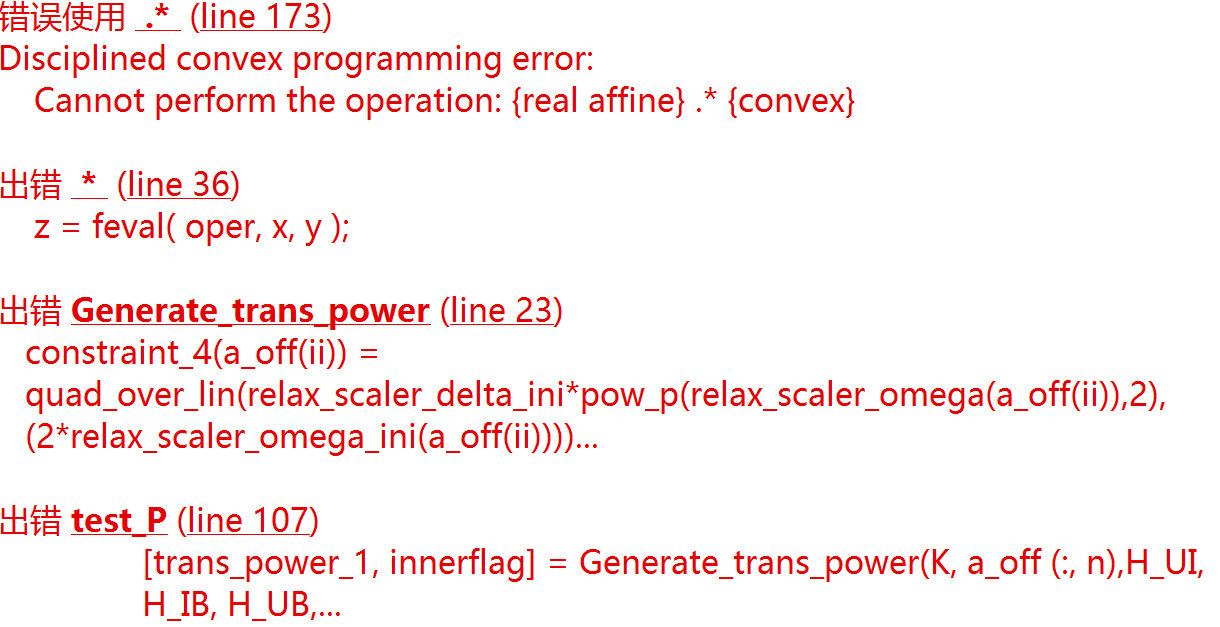
relax_scaler_delta_ini*pow_p(relax_scaler_omega(a_off(ii)),2)inv_pos(2relax_scaler_omega_ini(a_off(ii)))… + relax_scaler_omega_ini(a_off(ii))*pow_p(relax_scaler_delta(a_off(ii)),2)inv_pos(2relax_scaler_delta_ini) <= y(a_off(ii));
at a glance there is a coding problem. you use the same variable (omega,delta) to save the constant from last iteration, and be the variable of current iteration, which is confusing and makes no sense.
Thank you for your reply,but I make a distinction:
In the following code, I use the relax_scaler_delta and relax_scaler_omega from the last iteration as the next relax_scaler_delta_ini and relax_scaler_omega_ini,In other words, I use _ini to make a distinction
relax_scaler_delta_ini = relax_scaler_delta;
relax_scaler_omega_ini = relax_scaler_omega
sorry for the mistake. the error says you multiplied two convex expression, which is not permitted in cvx. please point out the line that threw the error, and format the code in markdown format.
Why are you using quad_over_lin or inv_pos? From the description in the first post, it appears the constraint is constant_1*omega^2 + constant_2*delta^2 <= p*constant_3
You should be able to enter that “as is” in CVX, presuming constant_1 and constant_2 evaluate to nonnegative. That makes LHS the sum of scalar convex quadratics.
Thank you for your reply.
I use quad_over_lin or inv_pos because I found that you gave this suggestion for the similar question in the forum.
May I ask where specifically I should input “as is” ?Can you give me an example?
Thank you for your kind!
relax_scaler_delta_ini = relax_scaler_delta;
relax_scaler_omega_ini = relax_scaler_omega
I seem to have made these two constants nonnegative:
relax_scaler_omega>0;
relax_scaler_delta>0;
Your code doesn’t show variable declarations. Which symbols are declared as CVX variables is crucial. Perhaps you are declaring some things as variables which actually should be input data. My code only declared 3 variables (what you said were the variables); everything else is input data from the standpoint of CVX.
You are showing so many scattered pieces and error messages, that I don’t know what goes with what, and maybe you don’t either. Do things systematically. if there is a line where you get an error message, examine each subexpression (print it at command line) to see what is going on. if you use my code template, there should be no CVX expression in any denominator.
I don’t know,. You are showing bits and pieces, so I don’t know what’s going on. Follow the advice from my previous post, which might have been entered while you were typing.
Maybe you will see that some of the things you think and want to be constants (input data), are actually CVX expressions, in which case there is something wrong with your code.