I have applied convex relaxation to a trajectory optimization problem and arrived at the coding stage in CVX. However, I have very little experience and am having trouble understanding the correct syntax. My optimization problem is defined as follows:
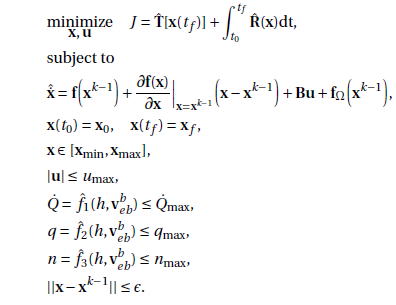
where T(x(tf)) is some convexified terminal cost, R(x) is some convexified running cost, f(x^k-1) is the state derivative of a previous solution, x is the state, B is [zeros(14,1);ones(4,1)], u is delta1:4 dot, and f_omega is Earth rotational terms. The first two constraints are the initial and terminal, the next are state limits, then control magnitude limits, heating rate limit, dynamic pressure limit and normal force limit. The final is a trust region constraint.
For the moment I’m just interested in getting the first run of the optimization, and not in the successive nature, or in enforcing the trust-region. I’ve been trying (to no avail) for a week or so now to determine how to correctly explain to cvx what the state is, what the control is and how to iterate through the time-steps to solve the optimization problem.
Could anybody help?