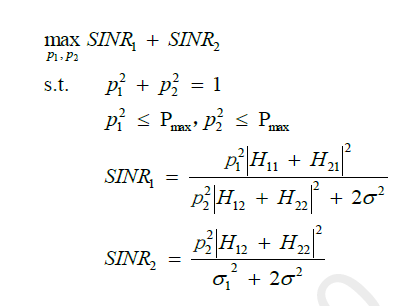
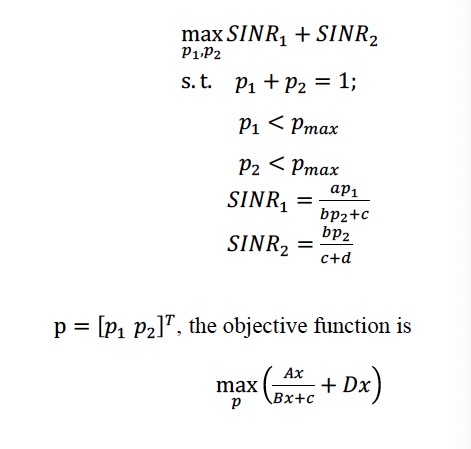
Meets the preceding text
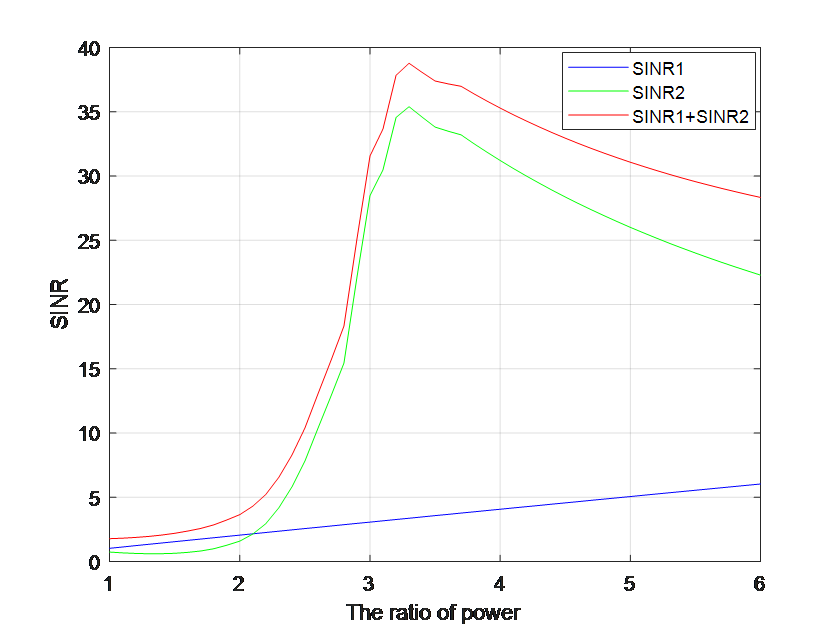
I solve the above reformulated convex optimization problem by CVX,and the status is ‘Solved’.But the optimal value is not exact. By following picture, the optimal p for primary problem is 3.2(it is a numerical modeling)
When I change the initialize p, the final value will change, too. But the optimal p is only for this problem. Why is it happening ?How can I find a feasible initialize p?
Here is the code and CVX display:
QAMbit1=4;
QAMbit2=16;
L=10000;
SNR=22;
SNR_V=10.^(SNR/10);
P0 =1;
N0=P0./SNR_V;
sigma = sqrt(N0/2);
n=sigma
randn(1,L)+sigma1i*randn(1,L);
%%
%initialization
p=3; %equal allocation
p2= P0./(1+p);
p1= p.*P0./(1+p);
rng(100)
decimal_data1=randi([0,QAMbit1-1],1,L);
data_bit1=de2bi(decimal_data1);
decimal_data2=randi([0,QAMbit2-1],1,L);
data_bit2=de2bi(decimal_data2);
const1=qammod([0:QAMbit1-1],QAMbit1);
power1=sum(abs(const1).^2)/QAMbit1;
qamdata1=qammod(decimal_data1,QAMbit1)/sqrt(power1);
const2=qammod([0:QAMbit2-1],QAMbit2);
power2=sum(abs(const2).^2)/QAMbit2;
qamdata2=qammod(decimal_data2,QAMbit2)/sqrt(power2);
H=[0.5063 0.5017;
0.5118 0.4907];
HH1=(H(1,1)+H(2,1))^2;
HH2=(H(1,2)+H(2,2))^2;
Y1=sqrt(p1)(H(1,1)+H(2,1))qamdata1;
Y2=sqrt(p2)(H(1,2)+H(2,2))qamdata2;
Y=Y1+Y2+n;
%SIC解码
r=Ysqrt(power1)/(sqrt(p1)(H(1,1)+H(2,1)));
recoverdata1=qamdemod(r,QAMbit1);
r1=qammod(recoverdata1,QAMbit1)/sqrt(power1);
r2=Y-sqrt(p1)(H(1,1)+H(2,1))r1;
rr2=r2sqrt(power2)/(sqrt(p2)(H(1,2)+H(2,2)));
recoverdata2=qamdemod(rr2,QAMbit2);
ep=mean(abs(recoverdata1-decimal_data1).^2);%imperfect SIC
%compute SINR
SINR1=p1HH1/(p2HH2+N0);
SINR2=p2HH2/(epp1HH1+N0);
SINR=SINR1+SINR2;
%put into formula
sita1=sqrt(p1HH1)/(p2HH2+N0);
sita2=sqrt(p2HH2)/(epp1HH1+N0);
cvx_begin
variables p1 p2
L=2sita1sqrt(p1HH1)-sita1^2(p2HH2+N0)+2sita2sqrt(p2HH2)-sita2^2*(epp1HH1+N0);
maximize(L)
subject to
p1 + p2 == 1
0 <= p1
0 <= p2 <=0.5
cvx_end
%%
p=p1/p2
Calling SDPT3 4.0: 11 variables, 5 equality constraints
For improved efficiency, SDPT3 is solving the dual problem.
num. of constraints = 5
dim. of sdp var = 4, num. of sdp blk = 2
dim. of linear var = 5
SDPT3: Infeasible path-following algorithms
version predcorr gam expon scale_data
HKM 1 0.000 1 0
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
0|0.000|0.000|2.5e+00|1.0e+01|9.0e+02| 4.010693e+01 0.000000e+00| 0:0:00| chol 1 1
1|1.000|0.977|2.2e-07|3.4e-01|6.2e+01| 3.704702e+01 1.460156e+00| 0:0:01| chol 1 1
2|1.000|1.000|5.3e-07|1.0e-02|5.8e+00| 7.133830e+00 1.549022e+00| 0:0:01| chol 1 1
3|1.000|0.977|8.3e-08|1.2e-03|1.2e+00| 4.654259e+00 3.432345e+00| 0:0:01| chol 1 1
4|0.938|1.000|4.7e-08|1.0e-04|8.5e-02| 3.811250e+00 3.726764e+00| 0:0:01| chol 1 1
5|0.972|0.970|3.8e-09|1.3e-05|3.4e-03| 3.750478e+00 3.747223e+00| 0:0:01| chol 1 1
6|0.974|0.940|4.2e-09|1.7e-06|1.4e-04| 3.748246e+00 3.748120e+00| 0:0:01| chol 1 1
7|0.955|0.952|6.5e-10|8.3e-08|6.9e-06| 3.748183e+00 3.748177e+00| 0:0:01| chol 1 1
8|1.000|0.989|3.7e-10|1.0e-09|8.7e-07| 3.748180e+00 3.748180e+00| 0:0:01| chol 1 1
9|1.000|1.000|6.4e-12|7.4e-11|1.5e-08| 3.748180e+00 3.748180e+00| 0:0:01|
stop: max(relative gap, infeasibilities) < 1.49e-08
number of iterations = 9
primal objective value = 3.74817992e+00
dual objective value = 3.74817990e+00
gap := trace(XZ) = 1.54e-08
relative gap = 1.81e-09
actual relative gap = 1.74e-09
rel. primal infeas (scaled problem) = 6.40e-12
rel. dual " " " = 7.44e-11
rel. primal infeas (unscaled problem) = 0.00e+00
rel. dual " " " = 0.00e+00
norm(X), norm(y), norm(Z) = 4.9e+00, 1.0e+00, 2.3e+00
norm(A), norm(b), norm© = 4.6e+00, 4.6e+00, 2.7e+00
Total CPU time (secs) = 0.98
CPU time per iteration = 0.11
termination code = 0
DIMACS: 7.6e-12 0.0e+00 1.0e-10 0.0e+00 1.7e-09 1.8e-09
Status: Solved
Optimal value (cvx_optval): +1.96063
p =
3.4692